
We look forward to providing you with professional services - Zhongda Leader


-
-
-
RV Cycloidal Pin Wheel Reducer
ZDF SERIES PRECISIOM PLANETARY GEAR MOTOR

■ Sectional Drawing
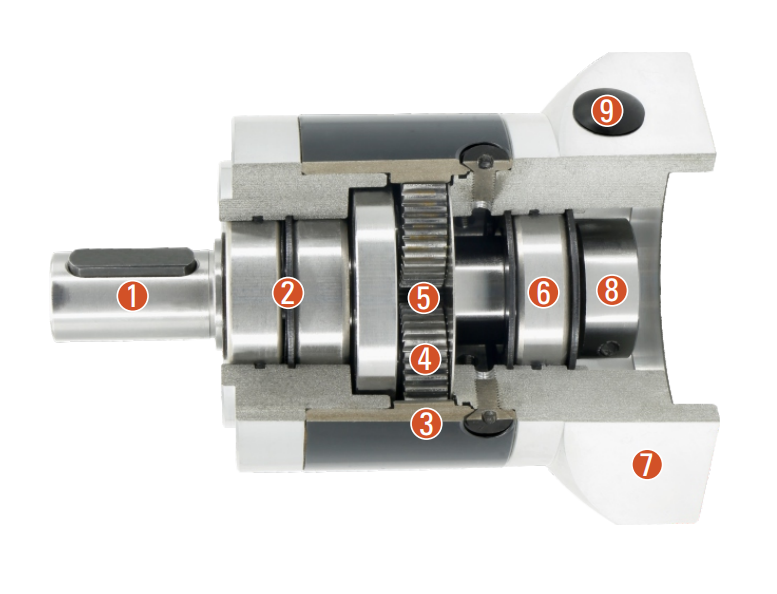
① Output shaft
② Bearing for the output shaft
③ Internal gear
④ Planetary gear
⑤ Sunwheel
⑥ Bearing for the sunwheel
⑦ Appropriate motor flange
⑧ Precision clamping system
⑨ Mounting hole■ Type And Model Number
ZD Series Gear Head Servo Motor 
① Gear head frame size:80 ② Gear head series code: ZDE: Roudmounting flange series ZDWE: Right angle input roud mounting flange series ZDF: Square mounting flange series ZDWF: Right angle input square mounting flange series ZDS: Hight stiffness series ③ Gear Ratio: Single Stage 3,4,5,8,10 TwoStage 9,12,15,16,20,25,32,40,64 Three Stage 60,80,100,120,160,200,256,320,512 ④ Amountof backlash
Precision(The load of output shaft is ±3%of allowable output torque)Reducer Type No Stage Standard Type 40ZDE/F 1 12分arc-min 2 15分arc-min 3 18分arc-min 60ZDE/F
80ZDE/F
120ZDE/F
160ZDE/F1 8分arc-min 2 12分arc-min 3 15分arc-min 115ZDS
142ZDS
190ZDS1 8分arc-min 2 12分arc-min 60ZDWE/F 1 30分arc-min 2 35分arc-min 3 40分arc-min 80ZDWE/F
120ZDWE/F
160ZDWE/F1 25分arc-min 2 30分arc-min 3 35分arc-min ⑤ Input shaft type S: Over locking(0mission)(Regardless whether the motor with keyway canuse it.) S1:Locking with locking ring (Regardless whether the motor with keyway can use it.) S2:Locking withkeyway (Input shaft with key) K:With keyway A:Other type(Please contact with us) ⑥ Applicable servo motor power (W) ⑦ Input flange and servo motor matching table (P15) ■ Technical Data
Product type 40 60 80 120 160 Reduction ratio Number of stage Rated output torque N.M 4.5 12 40 80 400 3 6 16 50 110 450 4 6 16 110 450 5 5 15 45 100 400 8 4 12 40 80 305 10 / 40 100 210 / 9 2 16.5 40 100 210 700 12 16.5 40 100 210 700 15 20 44 120 260 800 16 20 44 120 260 800 20 18 40 110 230 700 25 20 44 120 260 800 32 18 40 110 230 700 40 7.5 18 45 100 400 64 16.5 40 100 210 / 60 3 20 44 120 260 / 80 20 44 120 260 / 100 16.5 40 100 210 / 120 20 44 120 260 / 160 18 40 110 230 / 200 20 44 120 260 / 256 18 40 110 230 / 320 7.5 18 45 100 / 512 Life Hour 20,000 Instant stop torque N.M Two times of rated output torque Product type 40 60 80 120 160 Unit Number of stage Maxradial torque 160 450 900 2100 6000 N Max axial torque 80 225 450 1050 3000 N Full loadefficiency 96 % 1 94 2 90 3 Weight 0.4 0.9 2.1 6 18 Kg 1 0.5 1
.2.6 8 22 2 0.6 1.3 3.1 9.5 / 3 Operating temperature -25~+90 ℃ IP IP54 Lubrication type Lifetime lubrication Mounting type Any The max radial and axial torque work in the location of the center of output shaft when the out speed is 100RPM.
■ Technical Data
Product type 40 60 80 120 160 Reduction ratio Moment of inertia Kgcm² 0.031 0.135 0.77 2.63 12.14 3 0.022 0.093 0.52 1.79 7.78 4 0.019 0.078 0.45 1.53 6.07 5 0.017 0.065 0.39 1.32 4.63 8 0.015 0.054 0.34 1.14 3.52 10 / 0.131 0.74 2.62 / 9 0.022 0.088 0.50 2.56 7.47 12 0.019 0.077 0.44 1.79 6.65 15 0.022 0.088 0.50 1.75 7.47 16 0.019 0.075 0.44 1.50 6.65 20 0.019 0.075 0.44 1.49 5.81 25 0.017 0.064 0.39 1.30 4.50 32 0.016 0.064 0.39 1.30 4.50 40 0.016 0.064 0.39 1.30 4.50 64 0.019 0.075 0.50 1.50 / 60 0.019 0.075 0.50 1.50 / 80 0.019 0.075 0.44 1.49 / 100 0.016 0.064 0.39 1.30 / 120 0.016 0.064 0.39 1.30 / 160 0.016 0.064 0.39 1.30 / 200 0.016 0.064 0.39 1.30 256 0.016 0.064 0.39 1.30 / 320 0.016 0.064 0.39 1.30 / 512 Product type 40 60 80 120 160 Number of stage Backlash arcmin <12 <8 <8 <8 <8 1 <15 <12 <12 <12 <12 2 <18 <15 <15 <15 / 3 Product type 40 60 80 120 160 Torsional stiffness N.M/arcmin 0.7 1.8 4.5 12 38 Noise dB(A) 55 58 60 65 70 Max input speed min 4500 4500 4500 4500 4500 Recommnd input speed min¹ 3000 3000 3000 3000 3000 1. The moment of inertia is related with input shaft.
2. Noise test standard pressure level, distance 1m, measured on idle running with an input speed of 3000rpm.■ Dimensions
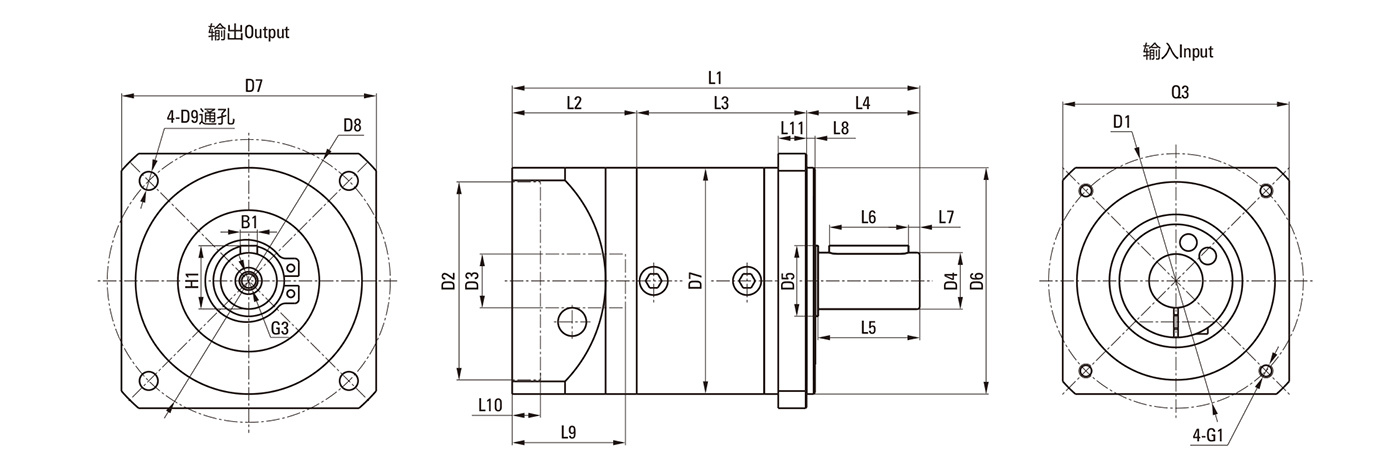
■ Unit: mm
Producttype 40ZDF 60ZDF 80ZDF 120ZDF 160ZDF Number of stage 1 2 3 1 2 3 1 2 3 1 2 3 1 2 L1 overall length 93.5 106.5 119 114 127 140 144 162 179.5 195.2 223 250.5 302 345.5 L3 body length 39 52 64.5 46.5 59.5 72.5 60 78 95.5 73.7 101.5 129 116 159.5 Output L4 output shaft length 26 35 40 55 87 L5 output length to the shaft shoulder 23 30.5 36 50 80 L6 key length 16 25 28 40 70 L7 key length to the shaft end 3.5 2.5 4 5 5 L8 spigot length 2 3 3 4 5 L11 output flange thickness 6 8 10 15 15 D4 output shaft diameter φ10h7 φ14h7 φ20h7 φ25h7 φ40h7 D5 shaft shoulder diameter φ12 φ17 φ25 φ35 φ55 D6 spigot diameter φ26h7 φ50h7 φ80h7 φ110h7 φ130h7 D7 output flange 45 60 □90 120 J160/□175 D8 hole circle φ50 φ70 φ100 φ130 φ185/φ200 D9 mounting hole φ3.5 φ5.5 φ6.5 φ8.5 φ11/φ13.5 B1 key width 3 5 6 8 12 H1 key height 11.2 16 22.5 28 43 G3 center screw hole M3X9 M5X12 M6X16 M10X22 M12X25 Input L2 input flange length 28.5 32 44 66.5 99 L9 motor shaft length 26 30 40 58 79 L10 spigot depth 6 10 10 10 10 D1 mounting hole distribution circle Φ46 Φ70 φ90 φ145 φ200 D2 spigot diameter φ30G7 φ50G7 φ70G7 φ110G7 φ114.3G7 D3 input shaft diameter <φ8G7 ≤φ14G7 ≤φ19G7 ≤φ24G7 ≤φ35G7 G1 mounting threads xdepth M4X10 M5X12 M6X15 M8X22 M12X25 03 input flange □40 □60 □80 □130 □175 ※ Input size made according to motor size.
GEAR MOTOR, also known as gear motor, is a power device that integrates a gear transmission mechanism with an electric motor.
Gear motors have numerous significant characteristics and advantages. It has a compact structural design that enables efficient power transmission within a limited space. Its gear transmission system can provide precise speed and torque control, meeting the needs of various application scenarios.
In the industrial field, gear motors are widely used in automated production lines, mechanical manufacturing equipment, and so on. It can drive various mechanical equipment such as conveyor belts, mixers, and elevators, ensuring the stability and efficiency of the production process. In the field of robotics, gear motors provide power for the joints and movements of robots, enabling them to perform various tasks flexibly and accurately.
Contact
Ningbo Zhongda Leader Intelligent Transmission Co., Ltd.
Add.: No. 185 Xinxing 1st Road, Cixi High-tech Industrial
Development Zone, Ningbo
Tel: +86-574-63537171
Fax: +86-574-63534879
WhatsApp: +86-19136773454
E-mail: trade20@zd-motor.comFollow us on social:





Copyright © Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. All Right Reserved. Powered by www.300.cn SEO Business license
-
