
We look forward to providing you with professional services - Zhongda Leader


-
-
-
RV Cycloidal Pin Wheel Reducer
PRODUCTS
Detail
■ Type And Model Number
ZDR Reducers Servo Motor 
① Gear head frame size:ZDR:52,78,98,125 ② Gear head series code:ZDR:Oblique tooth precision ➂ GearRatio:ZDR:Single Stage 3,5,7,9,10;Two Stages 15,20,25,35,45,81 Reducer Type No Stage Standard Type Low-blacklash Type High Precision Type ➃ Amount of backlash 52ZDR 1 12分arc-min 10分arc-min 3分arc-min 2 15分arc-min 12分arc-min 5分arc-min 78ZDR 1 8分arc-min 5分arc-min 3分arc-min 2 12分arc-min 8分arc-min 5分arc-min 98ZDB 1 8分arc-min 5分arc-min 3分arc-min 2 12分arc-min 8分arc-min 5分arc-min 125ZDR 1 8分arc-min 5分arc-min 3分arc-min 2 12分arc-min 8分arc-min 5分arc-min ⑤ nput shaft type
S: Overall locking(Omission)(regardless whether the motor with keyway can use it. But D Cut can’t use)
S1: Locking with locking ring(regardless whether the motor with keyway can use it. ButDCut can’t use)
S2: Locking with keyway (input shaft with key)
K: With keyway
A: Other type (please contact with us)➅ Applicable servo motor power (W) ⑦ Manufacturer name of servo motor (P33) ➇ Model of servo motor ■ Sectional Drawing
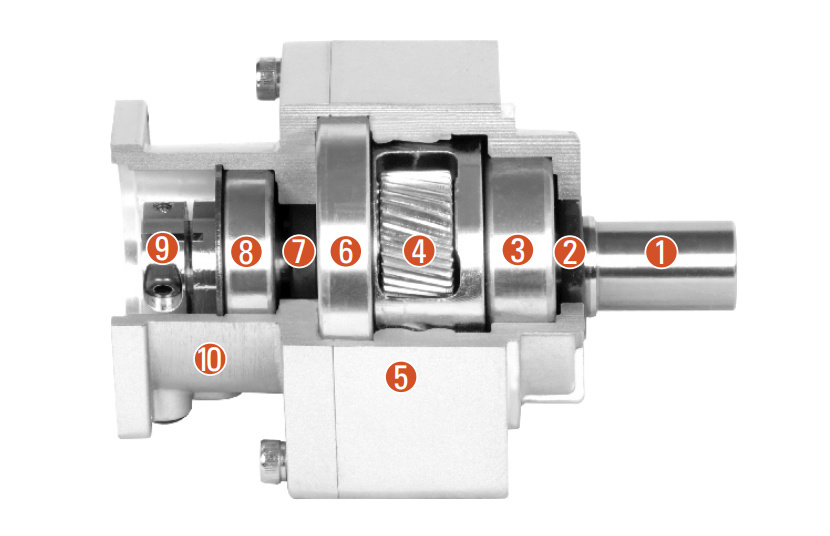
① Output shaft
② Seal for the output shaft
③ Bearing for the output shaft
④ Planetary gear
⑤ Front cover
⑥ Bearing for the output shaft
⑦ Seal for the input shaft
⑧ Bearing for the input shaft
⑨ Precision clamping system
➉ Rear coverZDR PERFORMANCE TABLE (WHEN INPUT SPEED IS 3000RPM)
■ Performance Table
Reduction
RatioMode Outout
Shaft SpeedStandard
0utput TorqueInstantaneous
max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Model Reduction
RatioMotor (rpm (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 1/3 52 ZDR 3 -50 1000 0.255 0.784 392 196 0.0575 3.43 10.3 52 ZDR 3 -100 1000 0.715 2.06 392 196 0.0575 3.43 10.3 52 ZDR 3 -200 1000 1.47 4.51 392 196 0.135 3.43 10.3 52 ZDR 3 -400 1000 3.43 10.3 392 196 0.145 3.43 10.3 78 ZDR 3 -750 1000 6.37 19.3 784 392 0.913 6.86 20.6 98 ZDR 3 -1000 1000 7.55 22.8 882 441 2.43 18.3 54.9 98 ZDR 3 -1500 1000 12.3 37.1 882 441 2.43 18.3 54.9 98 ZDR 3 -2000 1000 17.2 51.5 882 441 2.43 18.3 54.9 125 ZDR 3 -2500 1000 19.0 57.2 1370 686 5.55 44.1 132 125 ZDR 3 -3000 1000 23.7 71.2 1370 686 5.50 44.1 132 125 ZDR 3 -3500 1000 28.3 85.2 1370 686 5.50 44.1 132 125 ZDR 3 -4000 1000 33.1 99.0 1370 686 5.78 44.1 132 125 ZDR 3 -4500 1000 37.7 113 1370 686 5.78 44.1 132 125 ZDR 3 -5000 1000 42.9 128 1370 686 5.78 44.1 132 1/5 52 ZDR 5 -50 600 0.510 1.47 490 245 0.04 1.57 4.70 52 ZDR 5 -100 600 1.18 3.72 490 245 0.04 1.57 4.70 52 ZDR 5 -200 600 2.65 8.04 490 245 0.118 2.84 8.53 78 ZDR 5 -400 600 5.39 16.2 980 490 0.363 6.57 19.7 78 ZDR 5 -750 600 10.7 32.1 980 490 0.713 11.5 34.3 98 ZDR 5 -1000 600 13.4 40.5 1080 539 1.85 23.5 70.6 98 ZDR 5 -1500 600 21.5 64.4 1080 539 1.85 23.5 70.6 125 ZDR 5 -2000 600 23.8 71.5 1670 833 3.50 56.8 171 125 ZDR 5 -2500 600 31.8 95.5 1670 833 3.50 56.8 171 125 ZDR 5 -3000 600 39.6 119 1670 833 3.48 56.8 171 125 ZDR 5 -3500 600 47.2 141 1670 833 3.48 56.8 171 125 ZDR 5 -4000 600 55.3 166 1670 833 3.75 56.8 171 1/9 52 ZDR 9 -50 333 0.921 2.74 588 294 0.035 2.35 7.25 52 ZDR 9 -100 333 2.25 6.86 588 294 0.035 2.35 7.25 78 ZDR 9 -200 333 3.72 11.3 1180 588 0.275 9.70 29.2 78 ZDR 9 -400 333 9.51 28.5 1180 588 0.275 9.70 29.2 98 ZDR 9 -750 333 18.2 54.7 1470 735 0.650 18.2 54.7 125 ZDR 9 -1000 333 20.0 60.1 1960 980 2.81 73.5 221 125 ZDR 9 -1500 333 34.3 103 1960 980 2.81 73.5 221 125 ZDR 9 -2000 333 48.6 146 1960 980 2.81 73.5 221 125 ZDR 9 -2500 333 60.8 182 1960 980 2.81 73.5 221 125 ZDR 9 -3000 333 73.0 219 1960 980 2.77 73.5 221 Note1) The moment of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note2) The max. input speed is 5000rpm. Usually set to 3000rpm or less.
Note3) The permissble radial load is indicated on the center of the output shaft.
Note4) All values are within the range corresponding to helical gear.Reduction
RatioMode Outout
Shaft SpeedStandard
0utput TorqueInstantaneous
max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueTypeNo Mode Reduction
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 1/15 52 ZDR 15 -50 200 1.67 5.00 784 392 0.035 4.02 12.2 52 ZDR 15 -100 200 3.72 11.4 784 392 0.035 4.02 12.2 78 ZDR 15 -200 200 6.27 18.8 1470 735 0.300 16.2 48.6 78 ZDR 15 -400 200 15.8 47.5 1470 735 0.300 16.2 48.6 98 ZDR 15 -750 200 30.4 91.2 1760 882 0.700 30.4 91.2 125 ZDR 15 -1000 200 33.3 100 2350 1180 2.80 91.4 274 125 ZDR 15 -1500 200 57.2 172 2350 1180 2.80 91.4 274 125 ZDR 15 -2000 200 81.0 243 2350 1180 2.80 91.4 274 1/20 52 ZDR 20 -50 150 2.21 6.63 804 402 0.034 5.00 15.0 52 ZDR 20 -100 150 5.00 15.0 804 402 0.034 5.00 15.0 78 ZDR 20 -200 150 8.69 26.1 1570 785 0.294 21.1 63.3 78 ZDR 20 -400 150 21.1 63.3 1570 785 0.294 21.1 63.3 98 ZDR 20 -750 150 40.6 122 1910 955 0.690 40.6 122 125 ZDR 20 -1000 150 44.5 134 2500 1250 2.72 78.4 235 1/25 52 ZDR 25 -50 120 2.74 8.33 882 441 0.0325 4.02 12.2 52 ZDR 25 -100 120 6.27 19.0 882 441 0.0325 6.27 19.0 78 ZDR 25 -200 120 11.1 33.3 1670 833 0.288 21.7 64.9 78 ZDR 25 -400 120 26.4 79.2 1670 833 0.288 26.4 79.2 98 ZDR 25 -750 120 50.7 152 2060 1030 0.680 50.7 152 125 ZDR 25 -1000 120 55.7 167 2650 1320 2.710 65.4 196 1/35 52 ZDR 35 -50 85 3.84 11.5 882 441 0.030 3.84 11.5 78 ZDR 35 -100 85 7.24 21.7 1670 833 0.065 13.9 41.7 78 ZDR 35 -200 85 15.5 46.6 1670 833 0.262 15.5 46.6 98 ZDR 35 -400 85 37.0 111 2060 1030 0.269 37.0 111 125 ZDR 35 -750 85 71.0 213 3430 1715 0.473 71.0 213 1/45 78 ZDR 45 -50 66 3.86 11.6 1670 833 0.0285 9.50 28.6 78 ZDR 45 -100 66 9.31 28.0 1670 833 0.0285 9.50 28.6 98 ZDR 45 -200 66 21.1 63.5 2060 1030 0.0256 28.3 85.2 125 ZDR 45 -400 66 47.5 142.5 3520 1760 0.245 57.0 171 125 ZDR 45 -750 66 91.3 274 3520 1760 1.770 91.3 274 1/81 78 ZDR 81 -50 37 7.02 20.8 1670 833 0.027 9.70 29.2 98 ZDR 81 -100 37 14.0 42.0 2060 1030 0.030 17.8 53.5 125 ZDR 81 -200 37 36.1 108.3 3530 1765 0.240 43.3 129.9 Note1) The moment of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note2) The max. input speed is 5000rpm. Usually set to 3000rpm or less.
Note3) The permissble radial load is indicated on the center of the output shaft.
Note4) All values are within the range corresponding to helical gear.ZDR PERFORMANCE TABLE (WHEN INPUT SPEED IS 2000RPM)
■ Performance Table
The same specification applies to all of standard type, P1(low backlash), and P2(high precision type).
Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Model Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m² (N.m) (N.m) 1/3 52 ZDR 3 -50 666 0.477 1.43 450 225 0.0575 3.43 10.3 52 ZDR 3 -100 666 1.05 3.15 450 225 0.135 3.43 10.3 52 ZDR 3 -200 666 2.48 7.45 450 225 0.145 3.43 10.3 78 ZDR 3 -400 666 5.01 15.0 900 450 0.913 6.86 20.6 98 ZDR 3 -750 666 8.73 26.2 1010 505 2.43 18.3 54.9 98 ZDR 3 -1000 666 12.3 37.1 1010 505 2.43 18.3 54.9 98 ZDR 3 -1500 666 18.3 54.9 1010 505 2.43 18.3 54.9 125 ZDR 3 -2000 666 23.7 71.2 1570 785 5.50 44.1 132 125 ZDR 3 -2500 666 30.8 92.5 1570 785 5.50 44.1 132 125 ZDR 3 -3000 666 37.7 113 1570 785 5.50 44.1 132 125 ZDR 3 -3500 666 44.1 132 1570 785 5.78 44.1 132 1/5 52 ZDR 5 -50 400 0.795 2.39 560 280 0.040 1.57 4.70 52 ZDR 5 -100 400 1.57 4.70 560 280 0.118 1.57 4.70 78 ZDR 5 -200 400 3.82 11.5 1120 560 0.363 6.57 19.7 78 ZDR 5 -400 400 8.35 25.1 1120 560 0.713 11.5 34.3 98 ZDR 5 -750 400 15.5 46.5 1230 615 1.85 23.5 70.6 98 ZDR 5 -1000 400 21.5 64.4 1230 615 1.85 23.5 70.6 125 ZDR 5 -1500 400 27.8 83.5 1900 950 3.50 56.8 171 125 ZDR 5 -2000 400 39.6 119 1900 950 3.48 56.8 171 125 ZDR 5 -2500 400 51.4 154 1900 950 3.75 56.8 171 1/9 52 ZDR 9 -50 222 1.57 4.72 670 335 0.035 2.35 7.25 78 ZDR 9 -100 222 2.35 7.04 1340 670 0.275 9.70 29.2 78 ZDR 9 -200 222 6.64 19.9 1340 670 0.275 9.70 29.2 98 ZDR 9 -400 222 14.0 41.9 1680 840 0.650 18.2 54.7 125 ZDR 9 -750 222 23.6 70.9 2240 1120 2.81 73.5 221 125 ZDR 9 -1000 222 34.3 103 2240 1120 2.81 73.5 221 125 ZDR 9 -1500 222 53.7 161 2240 1120 2.81 73.5 221 125 ZDR 9 -2000 222 73.0 219 2240 1120 2.77 73.5 221 1/15 52 ZDR 15 -50 133 2.62 7.87 882 441 0.035 4.02 12.2 78 ZDR 15 -100 133 3.91 11.7 1670 833 0.300 16.2 48.6 78 ZDR 15 -200 133 11.1 33.2 1670 833 0.300 16.2 48.6 98 ZDR 15 -400 133 23.3 69.8 2020 1010 0.700 30.4 91.2 125 ZDR 15 -750 133 39.4 118 2650 1320 2.80 91.4 274 125 ZDR 15 -1000 133 57.2 172 2650 1320 2.80 91.4 274 125 ZDR 15 -1500 133 91.3 274 2650 1320 2.80 91.4 274 1/20 52 ZDR 20 -50 100 3.50 10.5 910 455 0.034 5.00 15.0 78 ZDR 20 -100 100 5.73 17.2 1790 895 0.294 21.1 63.3 78 ZDR 20 -200 100 14.8 44.4 1790 895 0.294 21.1 63.3 98 ZDR 20 -400 100 31.0 93.1 2180 1090 0.294 40.6 122 1/25 52
78ZDR 25 -50 80.0 4.37 13.1 882 441 0.0325 6.27 19.0 ZDR 25 -100 80.0 7.16 21.5 1670 833 0.288 21.7 64.9 78 ZDR 25 -200 80.0 18.5 55.4 1670 833 0.288 21.7 64.9 98 ZDR 25 -400 80.0 38.8 116 2060 1030 0.680 50.7 152 125 ZDR 25 -750 80.0 65.4 196 2650 1320 1.88 65.4 196 1/35 78 ZDR 35 -50 57.0 4.43 13.3 1900 950 0.262 15.5 46.6 78 ZDR 35 -100 57.0 12.7 38.1 1900 950 0.262 15.5 46.6 98 ZDR 35 -200 57.0 22.0 66.0 2340 1170 0.269 37.0 111 1/45 78 ZDR 45 -50 44.4 5.80 17.4 1670 833 0.0285 9.50 28.6 98 ZDR 45 -100 44.4 14.0 42.1 2060 1030 0.0285 28.3 85.2 98 ZDR 45 -200 44.4 28.3 85.2 2060 1030 0.0285 28.3 85.2 1/81 78 ZDR 81 -50 24.6 9.70 29.2 1670 833 0.0270 9.70 29.2 98 ZDR 81 -100 24.6 17.8 53.5 2060 1030 0.0300 17.8 53.5 Note1) The moment of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note2) The permissble radial load is indicated on the center of the output shaft.
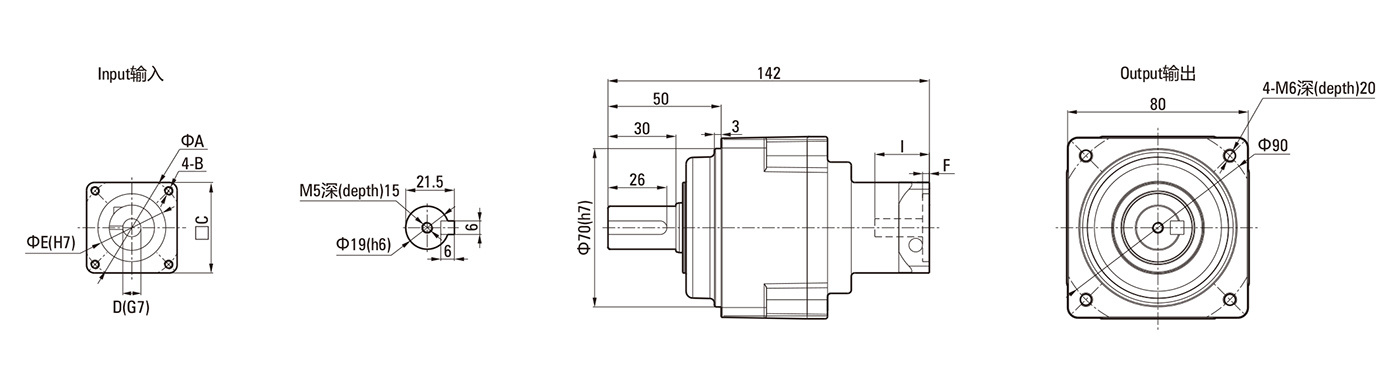
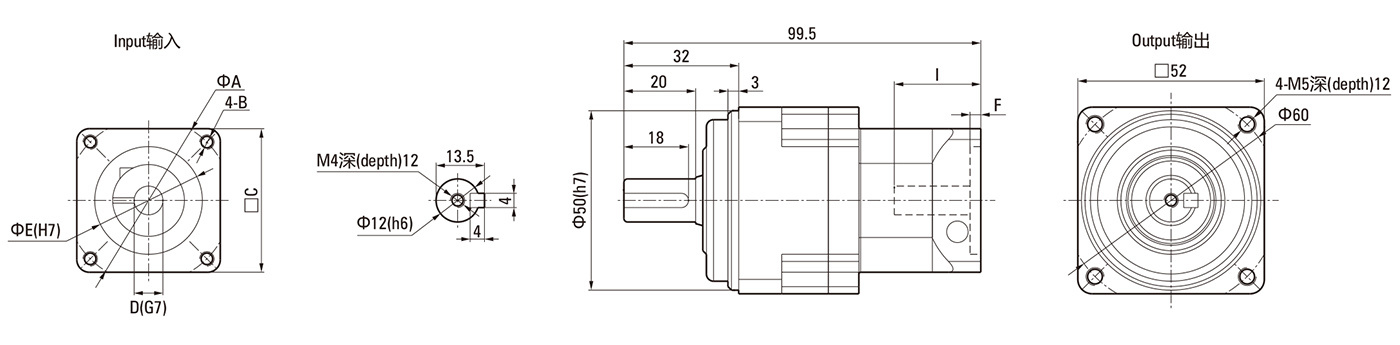
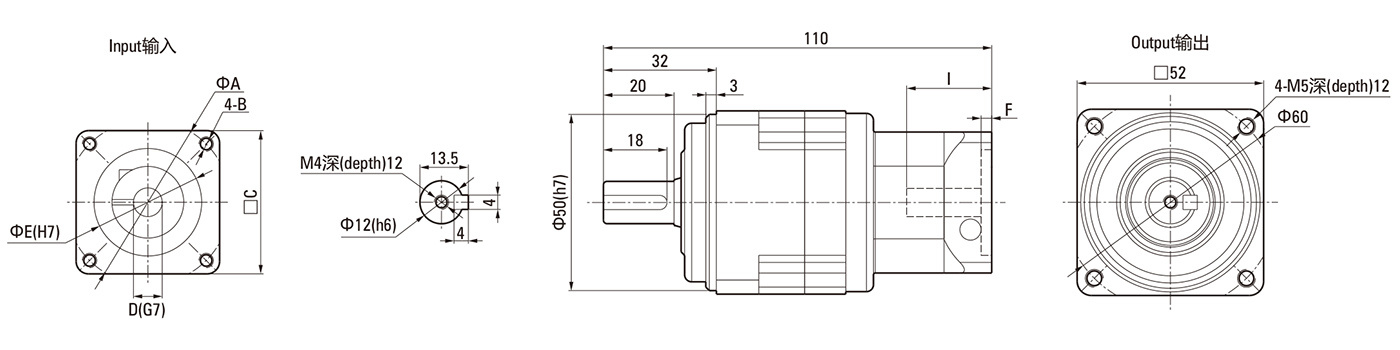
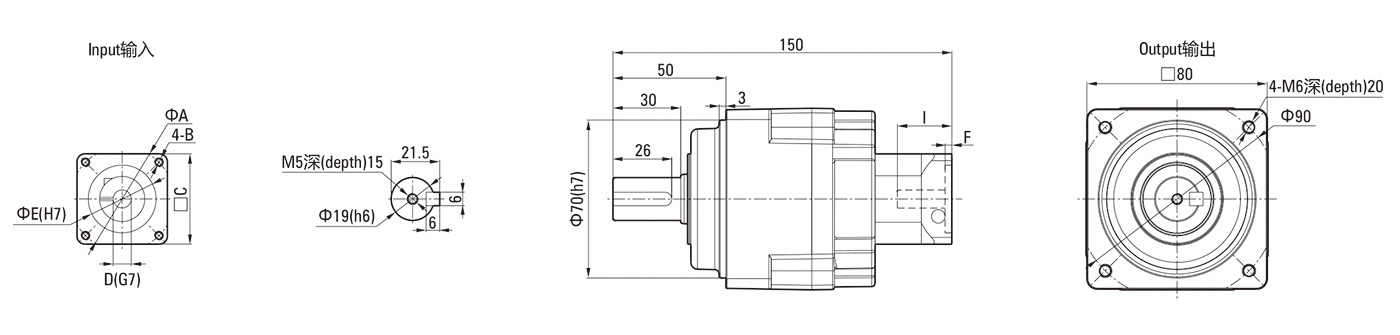
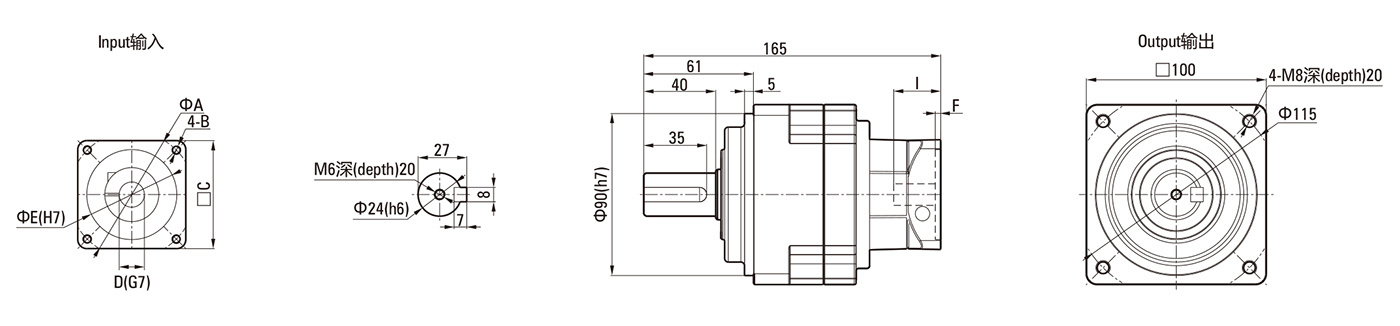
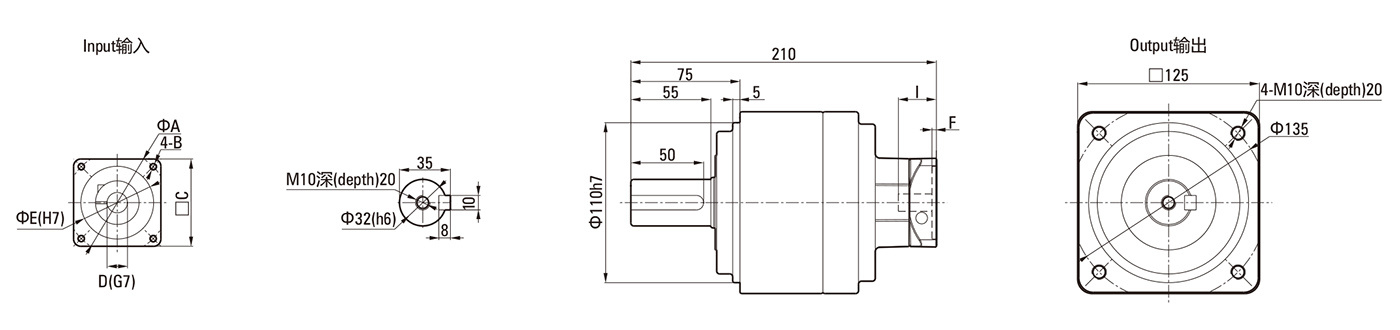
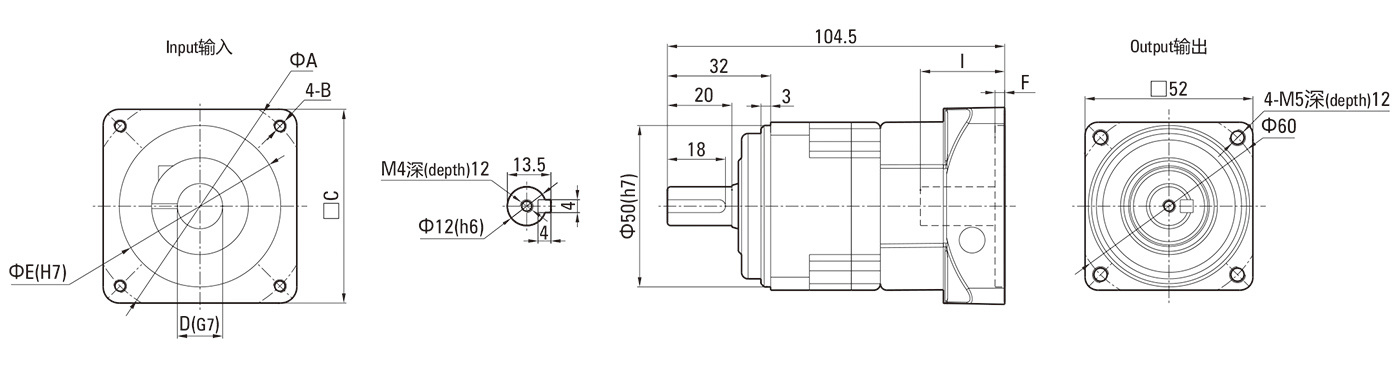
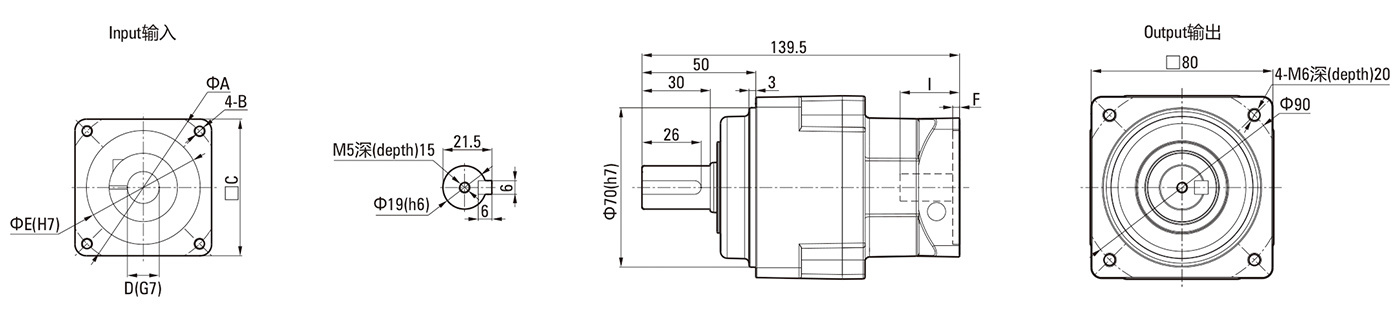
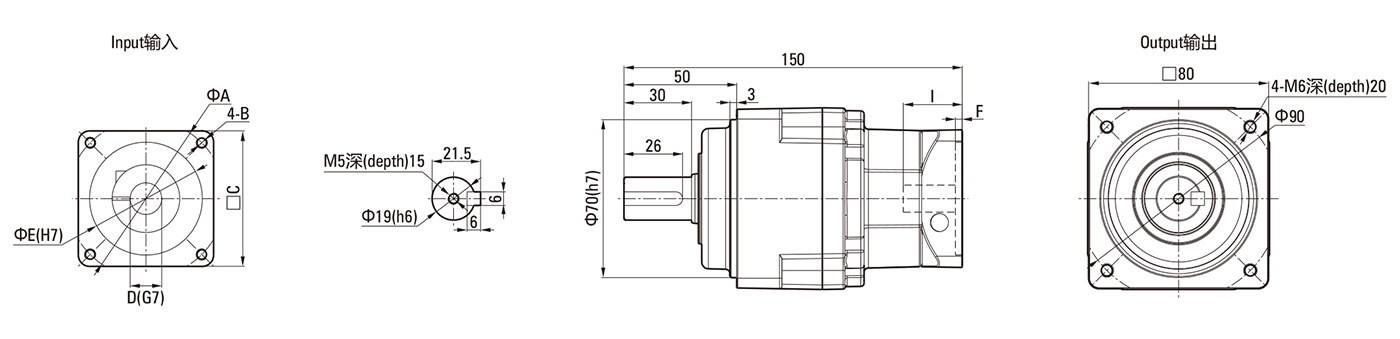
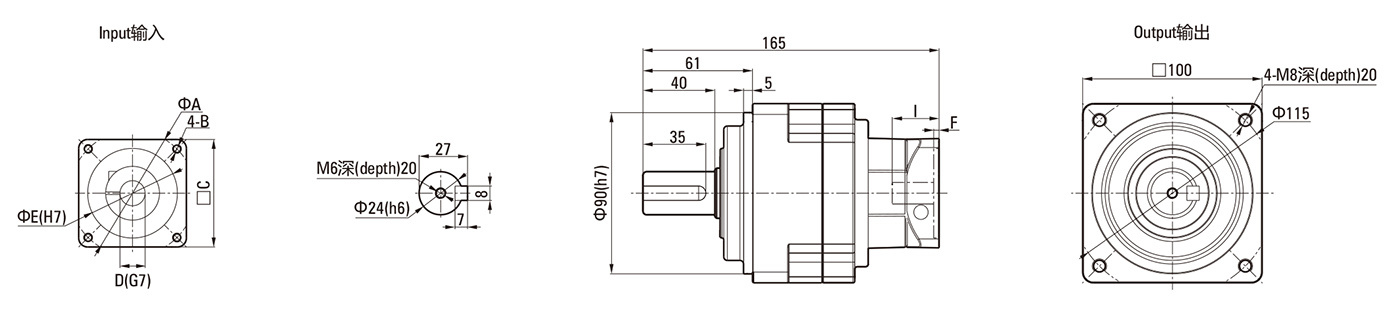
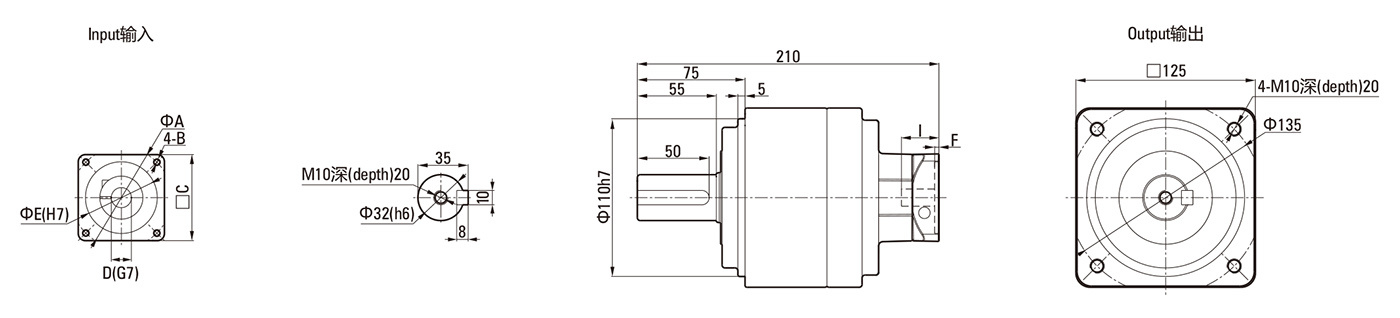
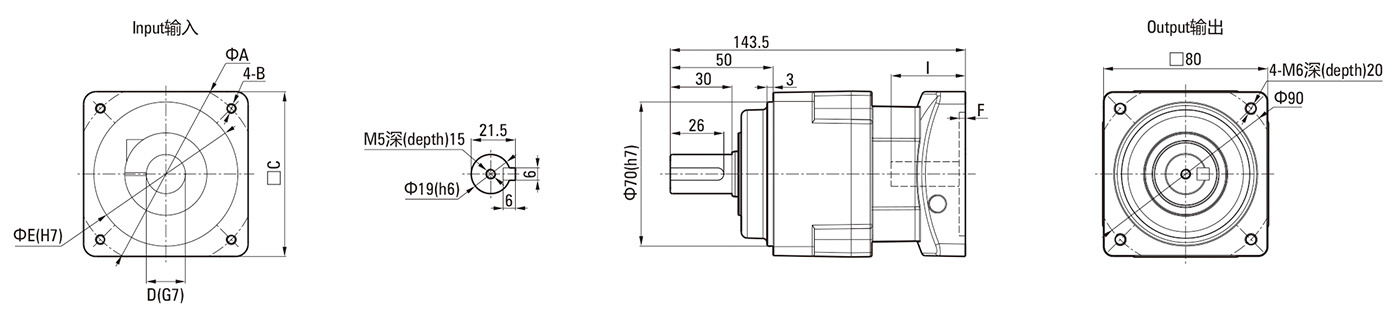
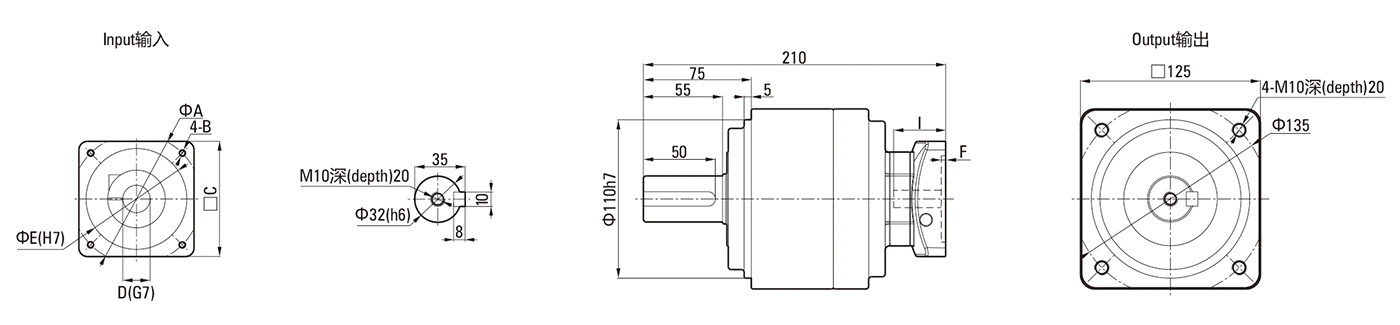
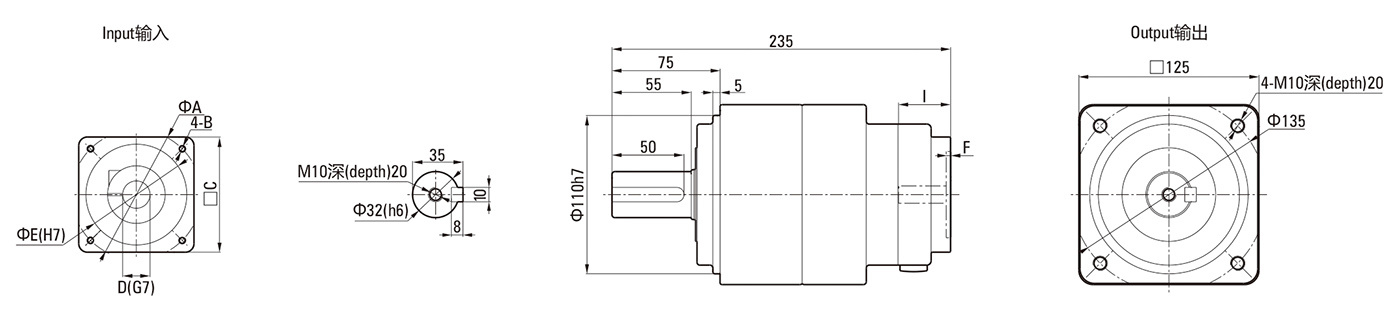
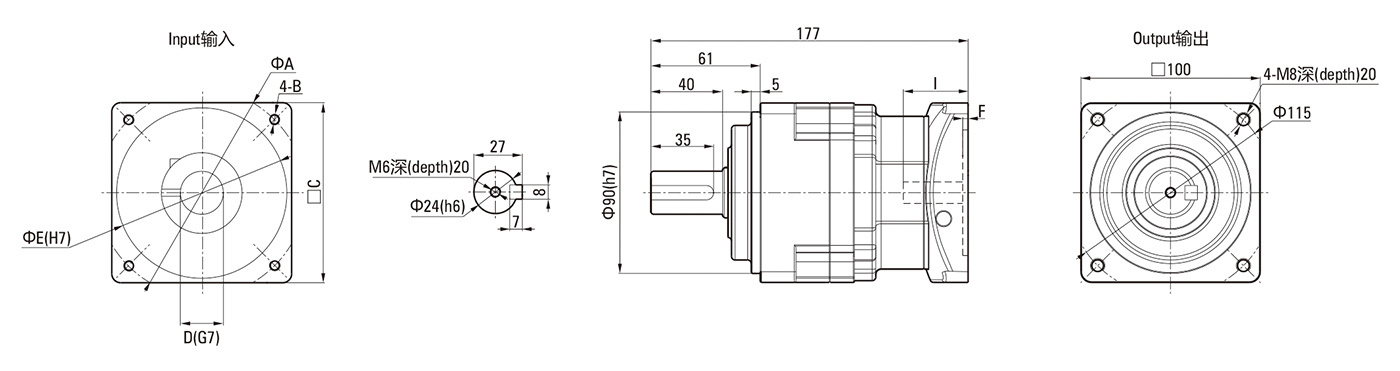
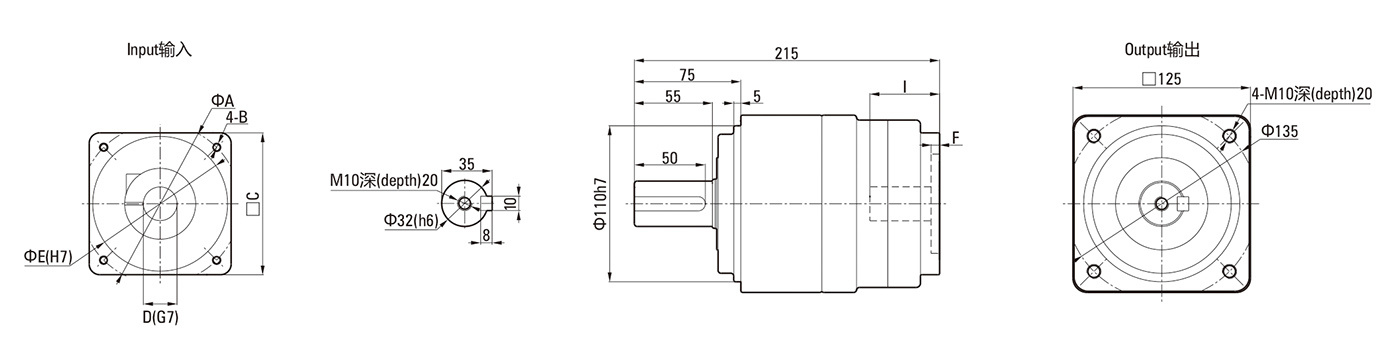
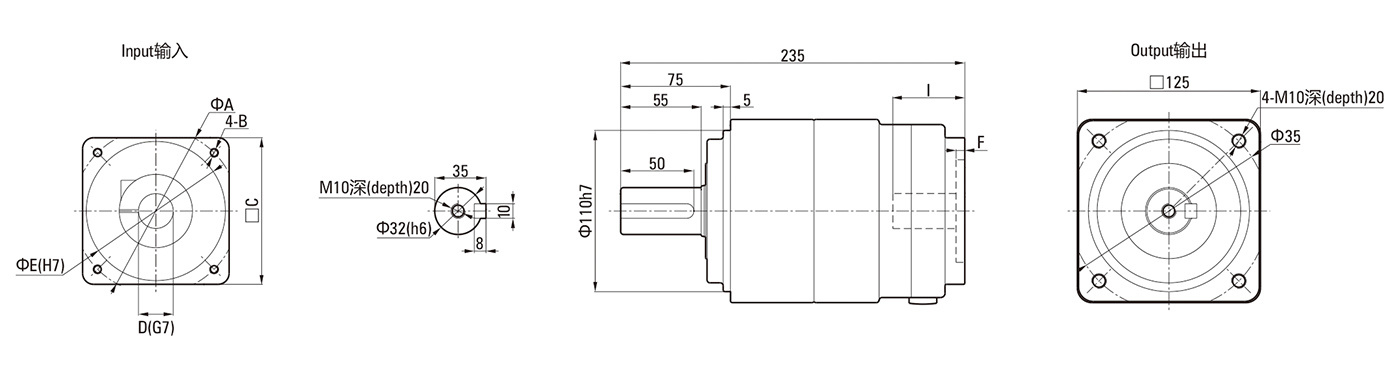
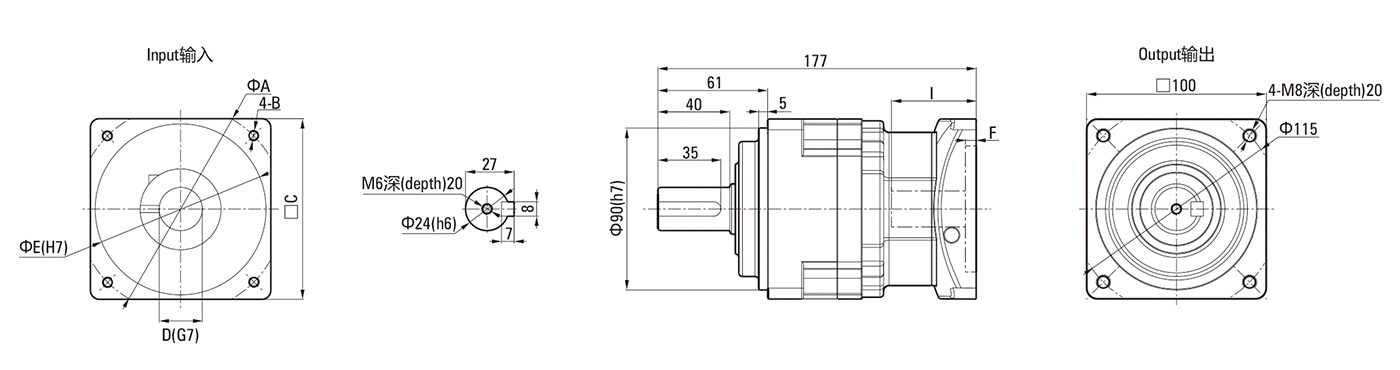
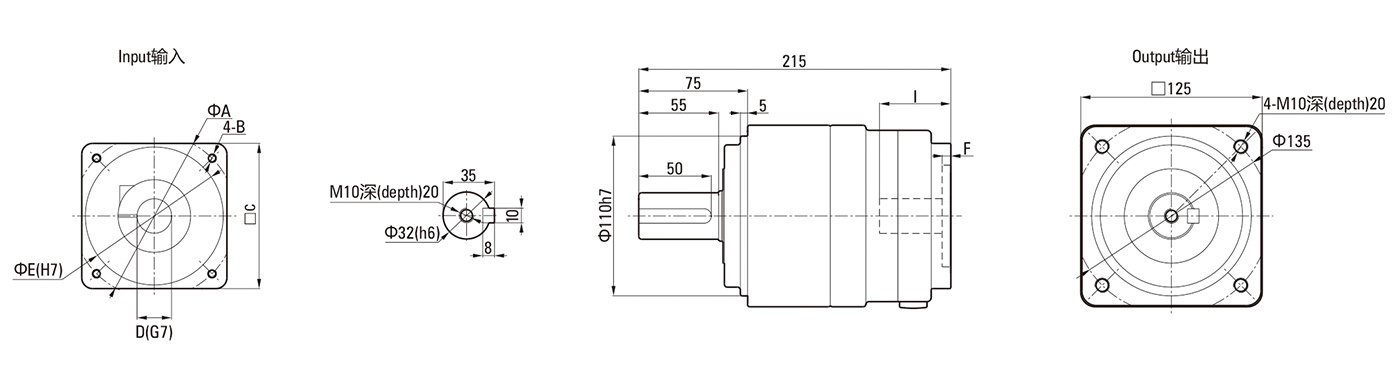
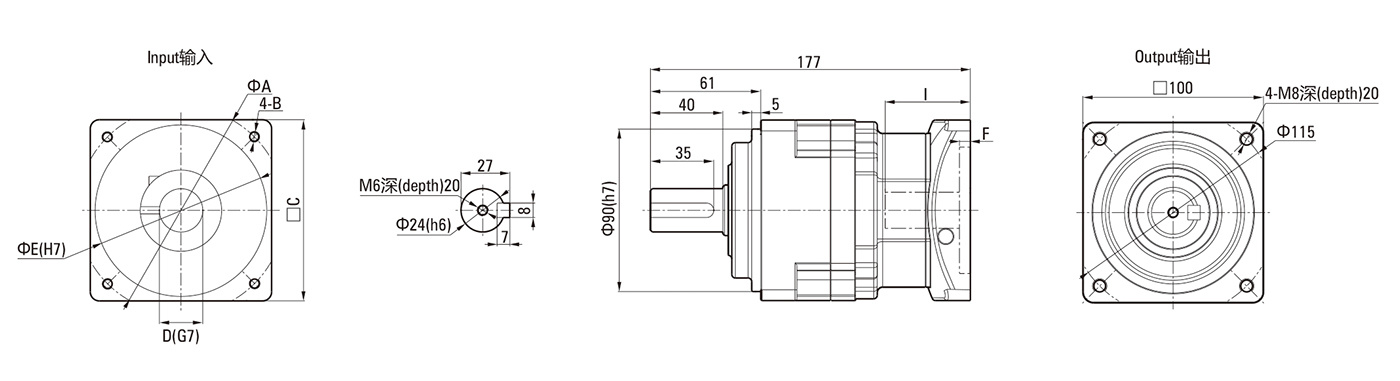
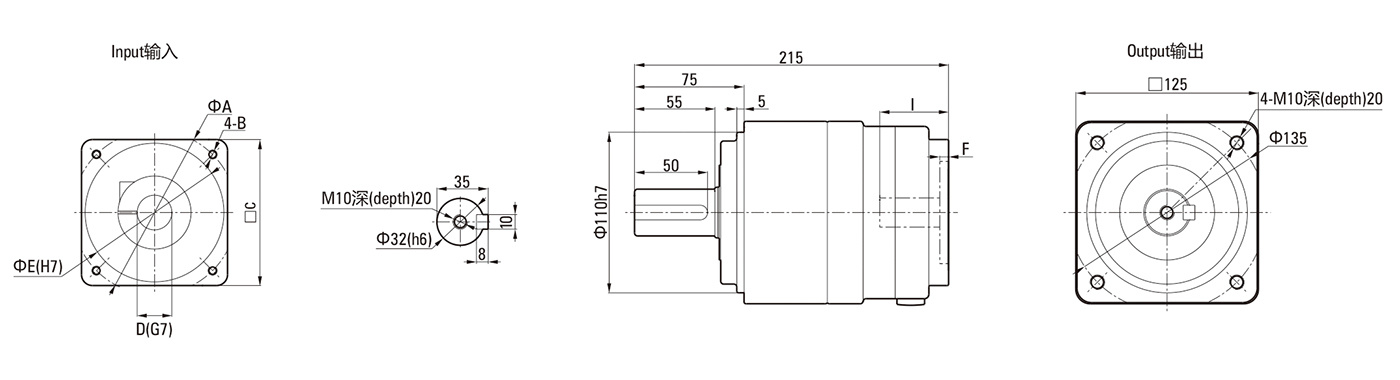
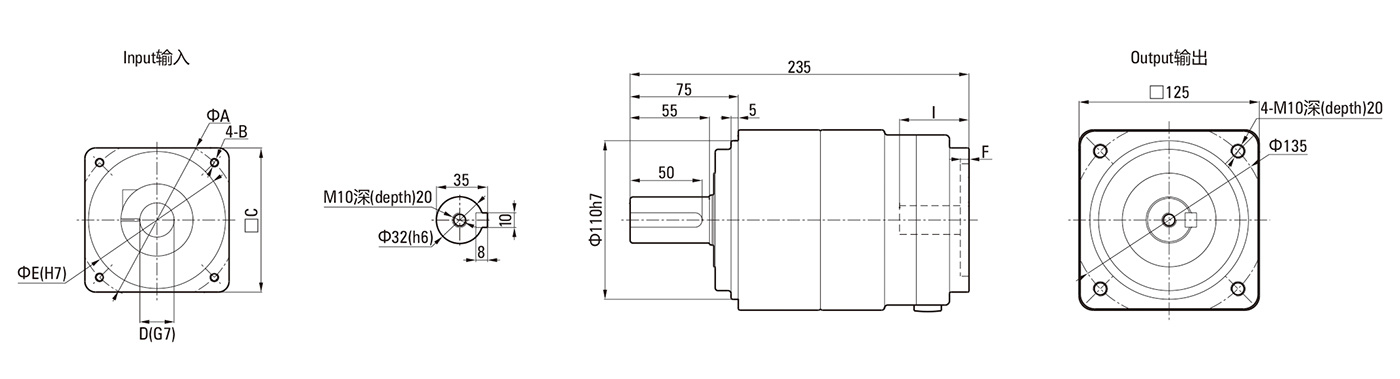
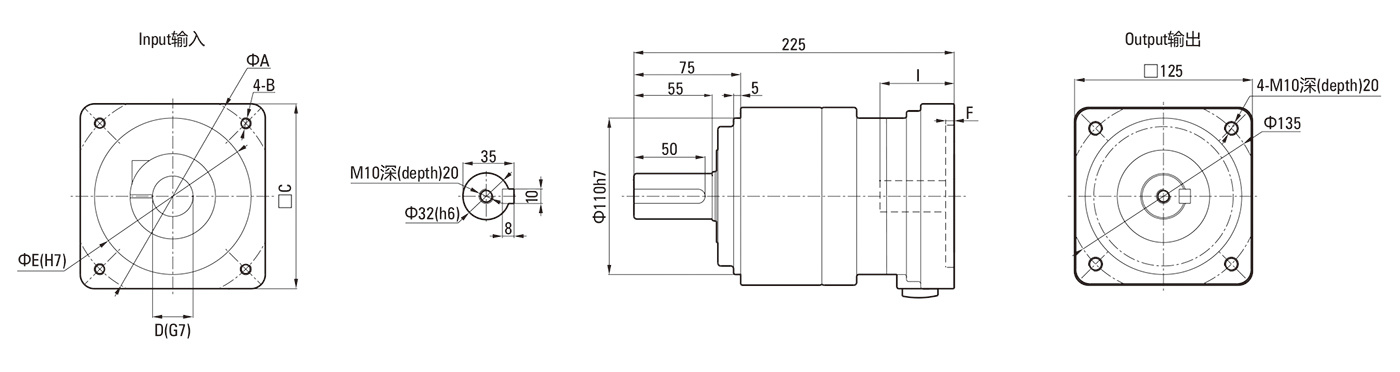
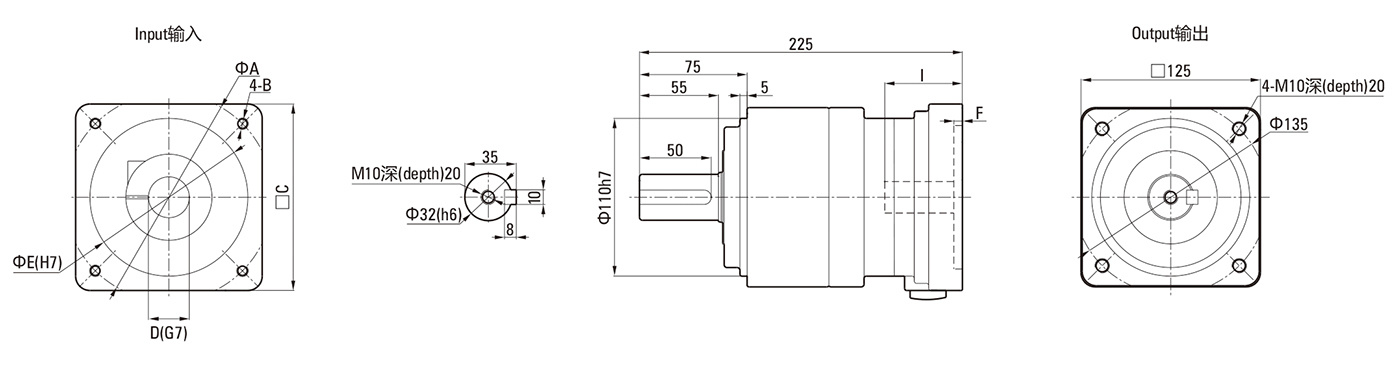
Note3) All values are within the range corresponding to helical gear.■ Dimensions
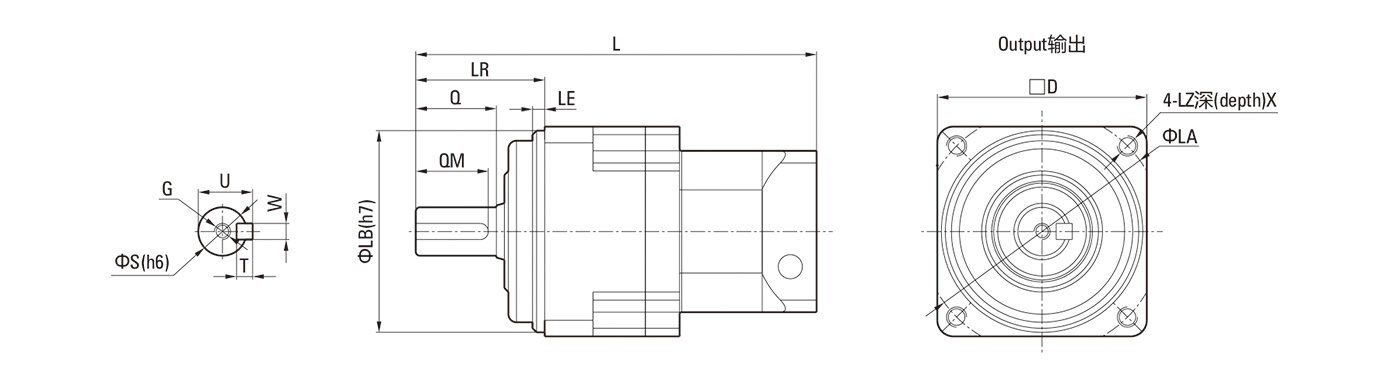
■ Dimensional Table
Type Total Length L Output Shaft Flange Type No Model Reduction
RatioMotor Panasonic-made
MSMA
Yaskawa-made
SGMASH
SGMSHMitsubishi-made
HC-KFS
HC-RFSLR S 0 0M G W×U T D LB LE LA LZ X 52 ZDR 3·5·9 50 99.5 32 12 20 18 M4(depth)12 4×13.5 4 52 50 3 60 M5 12 52 ZDR 15·20·25·35 50 110 52 ZDR 3·5·9 100 99.5 52 ZDR 15·20·25 100 110 52 ZDR 3·5 200 104.5 52 ZDR 3 400 78 ZDR 45·81 50 142 50 19 30 26 M5(depth)15 6×21.5 6 80 70 3 90 M6 20 78 ZDR 35 100 150 78 ZDR 45 100 142 78 ZDR 9 200 139.5 78 ZDR 15·20·25·35 200 150 78 ZDR 5·9 400 139.5 78 ZDR 15·20·25 400 150 78 ZDR 3·5 750 143.5 98 ZDR 81 100 158 61 24 40 35 M6(depth)20 8×27 7 100 90 5 115 M8 20 98 ZDR 45 200 165 98 ZDR 35 400 98 ZDR 9 750 158.5 98 ZDR 15·20·25 750 171 98 ZDR 3.5 1000 177 98 ZDR 3.5 1500 98 ZDR 3 2000 125 ZDR 81 200 210 75 32 55 52 M10(depth)20 10×35 8 125 110 5 135 M10 20 125 ZDR 45 400 125 ZDR 35 750 125 ZDR 45 750 235 125 ZDR 9 1000 215 125 ZDR 15·25 1000 235 125 ZDR 9 1500 215 125 ZDR 15 1500 235 125 ZDR 5·9 2000 215 125 ZDR 15 2000 235 125 ZDR 3·5·9 2500 215 - - 125 ZDR 3·5·9 3000 215 225 - 125 ZDR 3.5 3500 215 - 225 125 ZDR 3.5 4000 225 225 - 125 ZDR 3 4500 225 - - 125 ZDR 3 5000 225 Note1) Please inquire to us if motor model isn’t standard (Matching motor list). (The flange dimension may be different if motor assension is different.)
Note2) Rotation of the output shaft is in the same direction as that of motor input.
Note3) All values are within the range corresponding to helical gear.50W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Model Reduction
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 50W 1/3 52 ZDR 3 50 1000 0.255 0.784 392 196 0.0575 3.43 10.3 1/5 52 ZDR 5 50 600 0.510 1.47 490 245 0.0400 1.57 4.70 1/9 0
02ZDR 9 50 333 0.921 2.74 588 294 0.0350 2.35 7.25 1/15 52 ZDR 15 50 200 1.67 5.00 784 392 0.0350 4.02 12.2 1/20 52 ZDR 20 50 150 2.21 6.63 804 402 0.0340 5.00 15.0 1/25 52 ZDR 25 50 120 2.74 8.33 882 441 0.0325 4.02 12.2 1/35 52 ZDR 35 50 85 3.84 11.5 882 441 0.0300 3.84 11.5 1/45 78 ZDR 45 50 66 3.86 11.6 1670 833 0.0285 9.50 28.6 1/81 78 ZDR 81 50 37 7.02 20.8 1670 833 0.0270 9.70 29.2 Note1) In case of attachment to a motor beyond the standard models(motor matching series),
contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
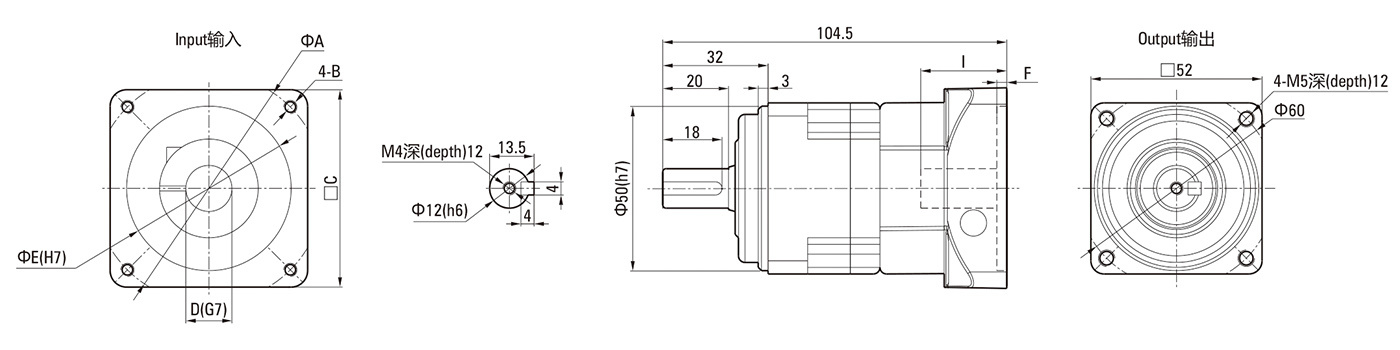
● 52ZDR3·5·9-50
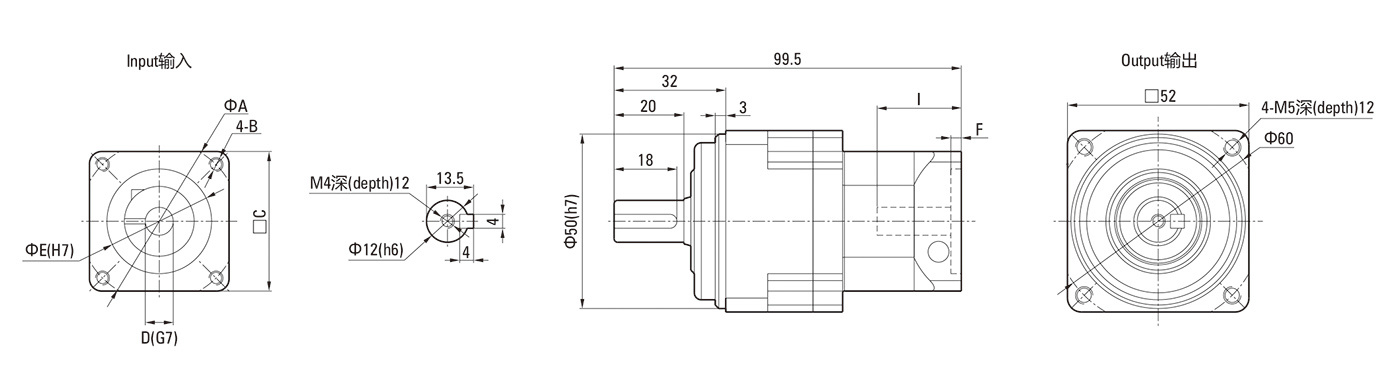
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 45 M3(depth)6.5 40 8 30 4 26 T2 46 M4(depth)6.5 40 6 30 4 26 T3 46 M4(depth)6.5 40 8 30 4 26 · Rough weight 0.55kg
· For details of T1~3, see page 33■ Dimensions
● 52ZDR15·20·25·35-50
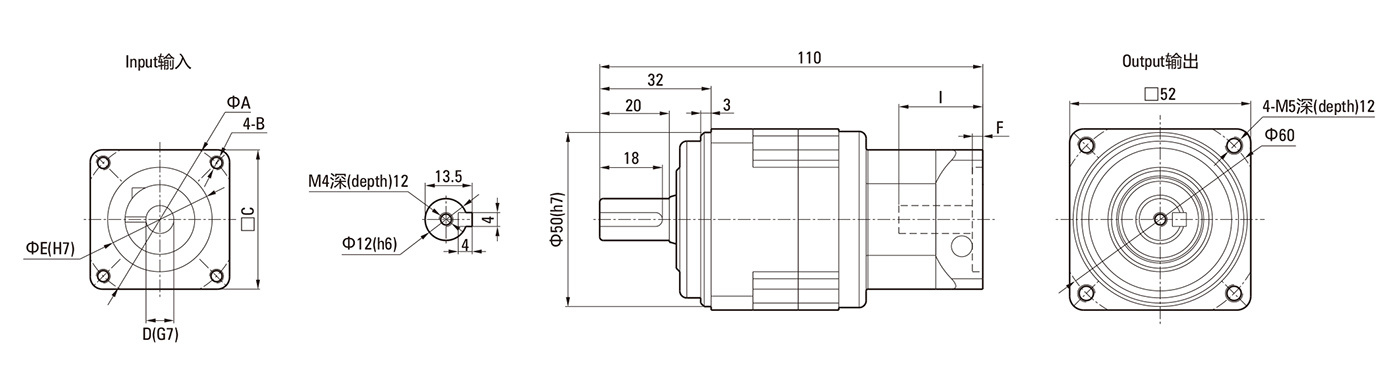
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 45 M3(depth)6.5 40 8 30 4 26 T2 46 M4(depth)6.5 40 6 30 4 26 T3 46 M4(depth)6.5 40 8 30 4 26 · Rough weight 0.7kg
· For details of T1~3, see page 33■ Dimensions
● 78ZDR45·81-50
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 45 M3(depth)6.5 40 8 30 4 26 T2 46 M4(depth)6.5 40 6 30 4 26 T3 46 M4(depth)6.5 40 8 30 4 26 · Rough weight 1.7kg
· For details of T1~3, see page 33100W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input
MotorReduction
RatioMode Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Model Reduction
RatioMotor (rpm (N.m) (N.m) (N) (N) (x10-4kg.m2) (N.m) (N.m) 100W 1/3 52 ZDR 3 100 1000 0.715 2.06 392 196 0.0575 3.43 10.3 1/5 52 ZDR 5 100 600 1.18 3.72 490 245 0.0400 1.57 4.70 1/9 52 ZDR 9 100 333 2.25 6.86 588 294 0.0350 2.35 7.25 1/15 52 ZDR 15 100 200 3.72 11.4 784 392 0.0350 4.02 12.2 1/20 52 ZDR 20 100 150 5.00 15.0 804 402 0.0340 5.00 15.0 1/25 52 ZDR 25 100 120 6.27 19.0 882 441 0.0325 6.27 19.0 1/35 78 ZDR 35 100 85 7.24 21.7 1670 833 0.0650 13.9 41.7 1/45 78 ZDR 45 100 66 9.31 28.0 1670 833 0.0285 9.50 28.6 1/81 98 ZDR 81 100 37 14.0 42.0 2060 1030 0.0300 17.8 53.5 Note1) In case of attachment to a motor beyond the standard models(motor matching series),
contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 52ZDR3·5·9-100
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 45 M3(depth)6.5 40 8 30 4 26 T2 46 M4(depth)6.5 40 8 30 4 26 T3 46 M4(depth)6.5 40 8 30 4 26 · Rough weight 0.55kg
· For details of T1~3, see page 33● 52ZDR15·20·25-100
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 45 M3(depth)6.5 40 8 30 4 26 T2 46 M4(depth)6.5 40 8 30 4 26 T3 46 M4(depth)6.5 40 8 30 4 26 · Rough weight 0.7kg
· For details of T1~3, see page 33● 78ZDR35-100
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 45 M3(depth)6.5 40 8 30 4 26 T2 46 M4(depth)6.5 40 8 30 4 26 T3 46 M4(depth)6.5 40 8 30 4 26 · Rough weight 2.0kg
· For details of T1~3, see page 33● 98ZDR81-100
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 45 M3(depth)6.5 40 8 30 4 26 T2 46 M4(depth)6.5 40 8 30 4 26 T3 46 M4(depth)6.5 40 8 30 4 26 · Rough weight 3.0kg
· For details of T1~3, see page 33200W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Model Reduction
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m2) (N.m) (N.m) 200W 1/3 52 ZDR 3 200 1000 1.47 4.51 392 196 0.135 3.43 10.3 1/5 52 ZDR 5 200 600 2.65 8.04 490 245 0.118 2.84 8.53 1/9 78 ZDR 9 200 333 3.72 11.3 1180 588 0.275 9.70 29.2 1/15 78 ZDR 15 200 200 6.27 18.8 1470 735 0.300 16.2 48.6 1/20 78 ZDR 20 200 150 8.69 26.1 1570 785 0.294 21.1 63.3 1/25 78 ZDR 25 200 120 11.1 33.3 1670 833 0.288 21.7 64.9 1/35 78 ZDR 35 200 85 15.5 46.6 1670 833 0.262 15.5 46.6 1/45 98 ZDR 45 200 66 21.1 63.5 2060 1030 0.0256 28.3 85.2 1/81 125 ZDR 81 200 37 36.1 108.3 3530 1765 0.240 43.3 129.9 Note1) In case of attachment to a motor beyond the standard models(motor matching series),
contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 52ZDR3·5-200
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 11 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 0.72kg
· For details of T1~3, see page 33● 78ZDR9-200
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 11 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 1.7kg
· For details of T1~3, see page 33● 78ZDR15·20·25·35-200
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 11 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 2.1kg
· For details of T1~3, see page 33● 98ZDR45-200
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 11 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 3.2kg
· For details of T1~3, see page 33● 125ZDR81-200
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 11 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 3.0kg
· For details of T1~3, see page 33400W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Model Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 400W 1/3 52 ZDR 3 400 1000 3.43 10.3 392 196 0.145 3.43 10.3 1/5 78 ZDR 5 400 600 5.39 16.2 980 490 0.363 6.57 19.7 1/9 78 ZDR 9 400 333 9.51 28.5 1180 588 0.275 9.70 29.2 1/15 78 ZDR 15 400 200 15.8 47.5 1470 735 0.300 16.2 48.6 1/20 78 ZDR 20 400 150 21.1 63.3 1570 785 0.294 21.1 63.3 1/25 78 ZDR 25 400 120 26.4 79.2 1670 833 0.288 26.4 79.2 1/35 98 ZDR 35 400 85 37.0 111 2060 1030 0.269 37.0 111 1/45 125 ZDR 45 400 66 47.5 142.5 3520 1760 0.245 57 171 Note1) In case of attachment to a motor beyond the standard models(motor matching series),
contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 52ZDR3-400
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 14 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 0.71kg
· For details of T1~3, see page 33● 78ZDR5·9-400
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 14 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 1.7kg
· For details of T1~3, see page 33● 78ZDR15·20·25-400
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 14 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 2.1kg
· For details of T1~3, see page 33● 98ZDR35-400
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 14 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 3.2kg
· For details of T1~3, see page 33● 125ZDR45-400
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 70 M4(depth)10 60 14 50 4 30 T2 70 M5(depth)10 60 14 50 4 30 T3 70 M5(depth)10 60 14 50 4 30 · Rough weight 7.2kg
· For details of T1~3, see page 33750W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 750W 1/3 78 ZDR 3 750 1000 6.37 19.3 784 392 0.913 6.86 20.6 1/5 78 ZDR 5 750 600 10.7 32.1 980 490 0.713 11.5 34.3 1/9 98 ZDR 9 750 333 18.2 54.7 1470 735 0.650 18.2 54.7 1/15 98 ZDR 15 750 200 30.4 91.2 1760 882 0.700 30.4 91.2 1/20 98 ZDR 20 750 150 40.6 122 1910 955 0.690 40.6 122 1/25 98 ZDR 25 750 120 50.7 152 2060 1030 0.680 50.7 152 1/35 125 ZDR 35 750 85 71.0 213 3430 1715 0.473 71.0 213 1/45 125 ZDR 45 750 66 91.3 274 3520 1760 1.77 91.3 274 Note1) In case of attachment to a motor beyond the standard models(motor matching series),
contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
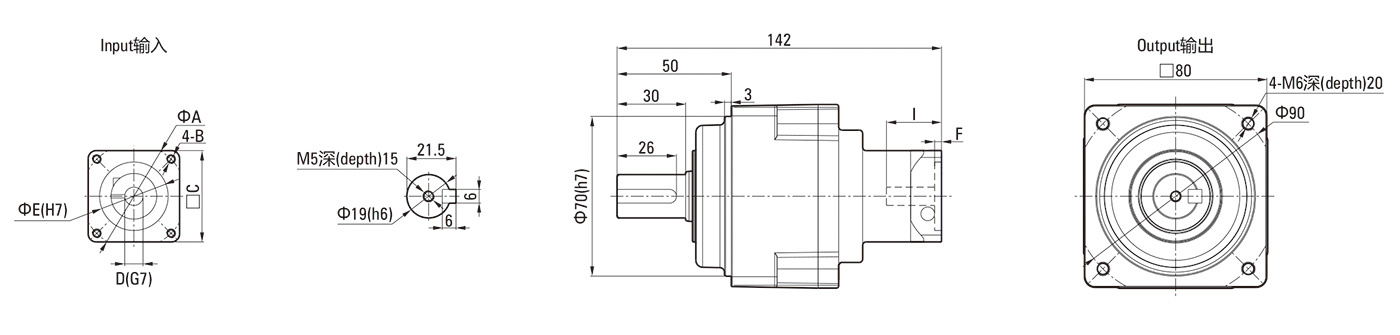
● 78ZDR3·5-750
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 90 M5(depth)10 80 19 70 4 40 T2 90 M6(depth)10 80 16 70 4 40 T3 90 M6(depth)10 80 19 70 4 40 · Rough weight 2.1kg
· For details of T1~3, see page 33● 98ZDR9-750
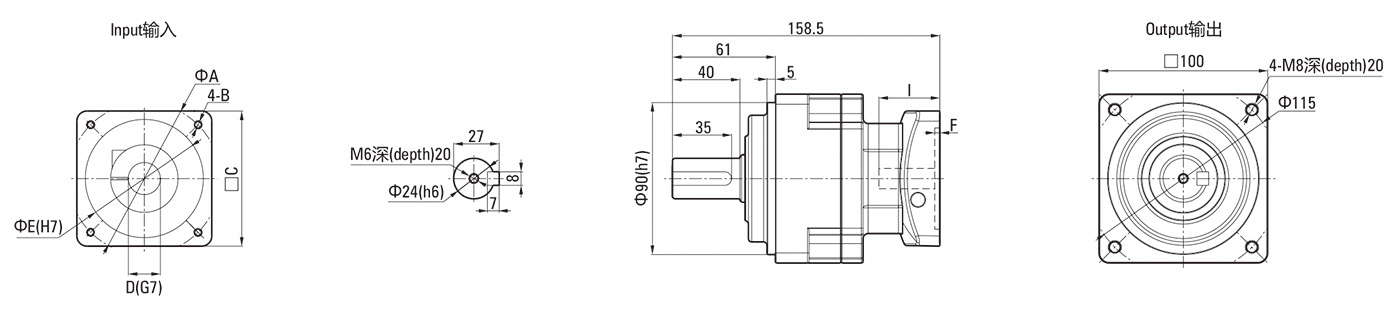
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 90 M5(depth)10 80 19 70 4 40 T2 90 M6(depth)10 80 16 70 4 40 T3 90 M6(depth)10 80 19 70 4 40 · Rough weight 3.4kg
· For details of T1~3, see page 33● 98ZDR15·20·25-750
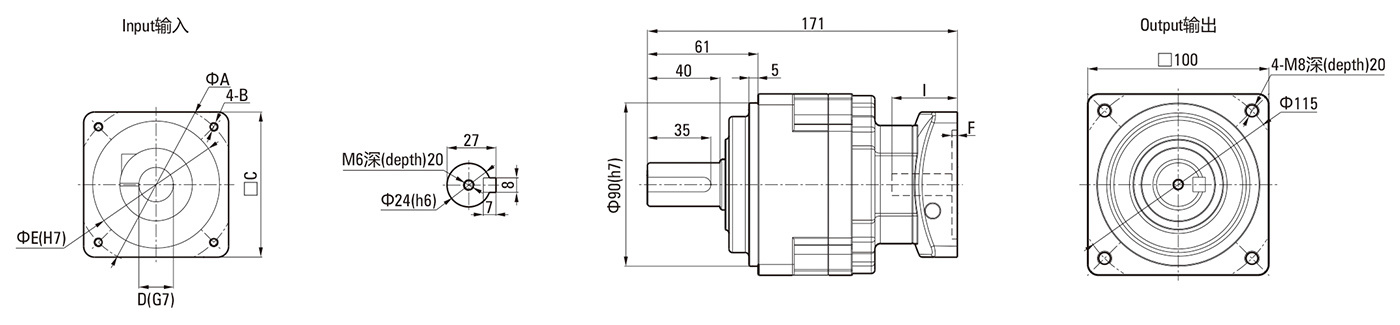
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 90 M5(depth)10 80 19 70 4 40 T2 90 M6(depth)10 80 16 70 4 40 T3 90 M6(depth)10 80 19 70 4 40 · Rough weight 3.8kg
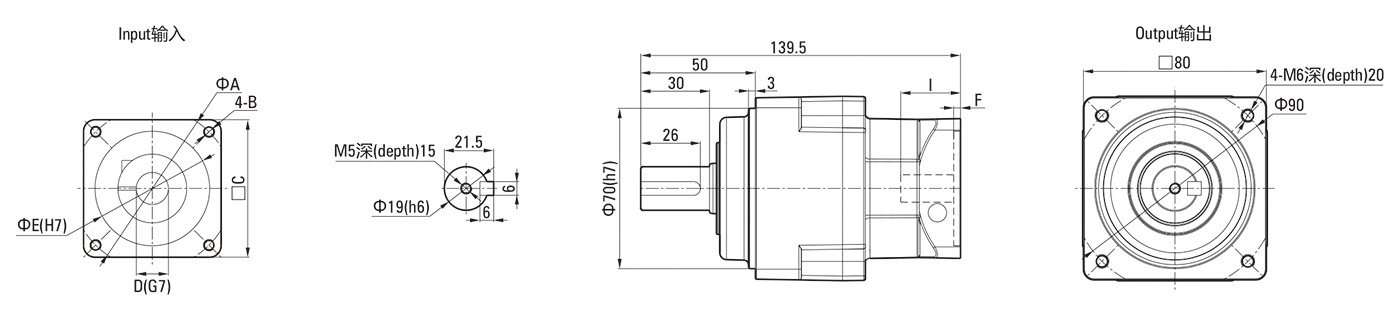
· For details of T1~3, see page 33● 125ZDR35-750
● Detailed Flange Dimensions Table (Unit:mm)
MotorType A B C D E F I T1 90 M5(depth)10 80 19 70 4 40 T2 90 M6(depth)10 80 16 70 4 40 T3 90 M6(depth)10 80 19 70 4 40 · Rough weight 7.2kg
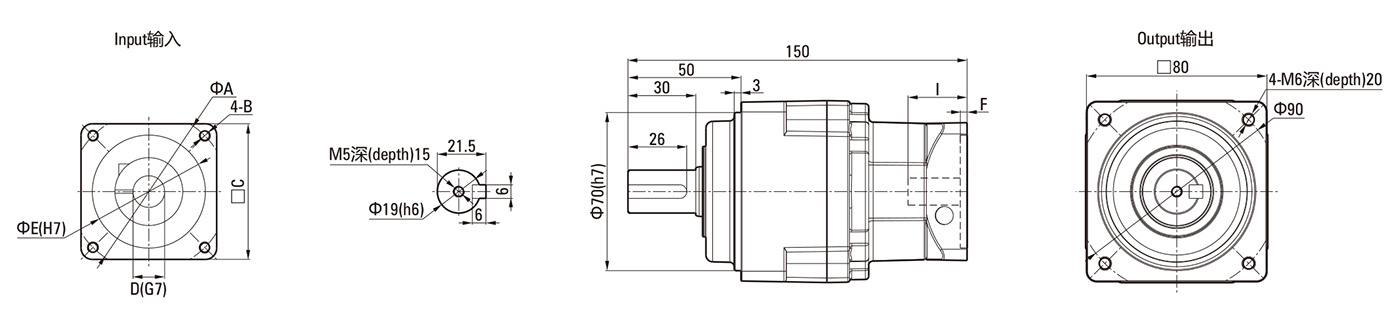
· For details of T1~3, see page 33● 125ZDR45-750
● Detailed Flange Dimensions Table (Unit:mm)
MotorType A B C D E F I T1 90 M5(depth)10 80 19 70 4 40 T2 90 M6(depth)10 80 16 70 4 40 T3 90 M6(depth)10 80 19 70 4 40 · Rough weight 12.0kg
· For details of T1~3, see page 331000W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 1000W 1/3 98 ZDR 3 1000 1000 7.55 22.8 882 441 2.43 18.3 54.9 1/5 98 ZDR 5 1000 600 13.4 40.5 1080 539 1.85 23.5 70.6 1/9 125 ZDR 9 1000 333 20.2 60.1 1960 980 2.81 73.5 221 1/15 125 ZDR 15 1000 200 33.3 100 2350 1180 2.80 91.4 274 1/20 125 ZDR 20 1000 150 44.5 134 2500 1250 2.72 78.4 235 1/25 125 ZDR 25 1000 120 55.7 167 2650 1320 2.71 65.4 196 Note1) In case of attachment to a motor beyond the standard models(motor matching series),
contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 98ZDR3·5-1000
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 100 M6(depth)15 90 19 80 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 115 M8(depth)15 100 24 95 4 55 · Rough weight 3.9kg
· For details of T1~3, see page 33● 125ZDR9-1000
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 100 M6(depth)15 90 19 80 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 115 M8(depth)15 100 24 95 4 55 · Rough weight 11.0kg
· For details of T1~3, see page 33● 125ZDR15·25-1000
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 100 M6(depth)15 90 19 80 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 115 M8(depth)15 100 24 95 4 55 · Rough weight 12.0kg
· For details of T1~3, see page 331500W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 1500W 1/3 98 ZDR 3 1500 1000 12.3 37.1 882 441 2.43 18.3 54.9 1/5 98 ZDR 5 1500 600 21.5 64.4 1080 539 1.85 23.5 70.6 1/9 125 ZDR 9 1500 333 34.3 103 1960 980 2.81 73.5 221 1/15 125 ZDR 15 1500 200 57.2 172 2350 1180 2.80 91.4 274 Note1) In case of attachment to a motor beyond the standard models(motor matching series),
contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 98ZDR3·5-1500
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 115 M8(depth)15 100 19 95 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 115 M8(depth)15 100 24 95 4 55 · Rough weight 3.9kg
· For details of T1~3, see page 33■ Dimensions
● 125ZDR9-1500
● Detailed Flange Dimensions Table (Unit:mm)
MotorType A B C D E F I T1 115 M8(depth)15 100 19 95 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 115 M8(depth)15 100 24 95 4 55 · Rough weight 11.5kg
· For details of T1~3, see page 33● 125ZDR15-1500

● Detailed Flange Dimensions Table (Unit:mm)
· Rough weight 12.5kg
Motor Type A B C D E F I T1 115 M8(depth)15 100 19 95 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 115 M8(depth)15 100 24 95 4 55
· For details of T1~3, see page 332000W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 2000W 1/3 98 ZDR 3 2000 1000 17.2 51.5 882 441 2.43 18.3 54.9 1/5 125 ZDR 5 2000 600 23.8 71.5 1670 833 3.50 56.8 171 1/9 125 ZDR 9 2000 333 48.6 146 1960 980 2.81 73.5 221 1/15 125 ZDR 15 2000 200 81.0 243 2350 1180 2.80 91.4 274 Note1) In case of attachment to a motor beyond the standard models(motor matching series),
contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 98ZDR3-2000
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 115 M8(depth)15 100 19 95 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 115 M8(depth)15 100 24 95 4 55 · Rough weight 3.9kg
· For details of T1~3, see page 33■ Dimensions
● 125ZDR5·9-2000
● Detailed Flange Dimensions Table (Unit:mm)
MotorType A B C D E F I T1 115 M8(depth)15 100 19 95 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 115 M8(depth)15 100 24 95 4 55 · Rough weight 11.5kg
· For details of T1~3, see page 33● 125ZDR15-2000
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 115 M8(depth)15 100 19 95 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 115 M8(depth)15 100 24 95 4 55 · Rough weight 12.5kg
· For details of T1~3, see page 332500W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 2500W 1/3 125 ZDR 3 2500 1000 19.0 57.2 1370 686 5.55 44.1 132 1/5 125 ZDR 5 2500 600 31.8 95.5 1670 833 3.50 56.8 171 1/9 125 ZDR 9 2500 333 60.8 182 1960 980 2.81 73.5 221 Note1) In case of attachment to a motor beyond the standard models (motor matching series),contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 125ZDR3·5·9-2500
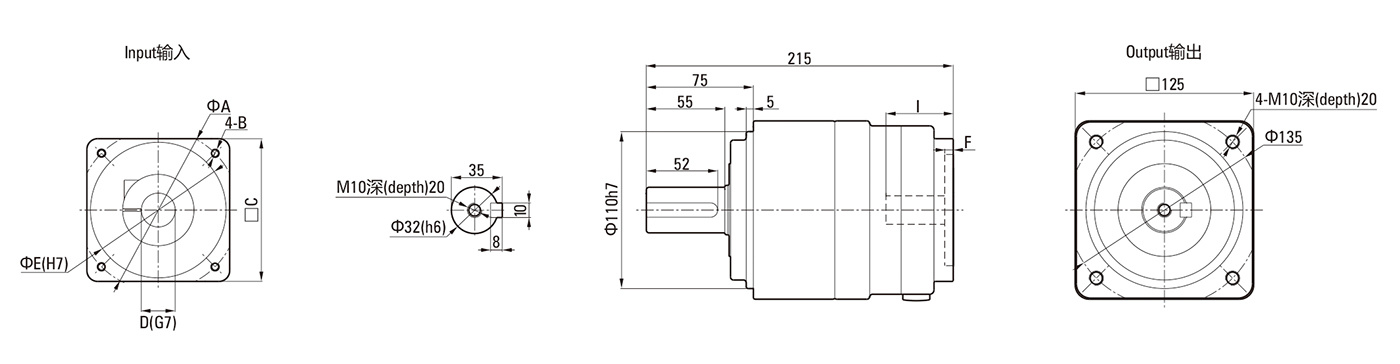
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 115 M8(depth)15 100 19 95 4 55 T2 115 M6(depth)15 100 24 95 4 55 T3 - - - - - - - · Rough weight 11.5kg
· For details of T1~3, see page 333000W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 3000W 1/3 125 ZDR 3 3000 1000 23.7 71.2 1370 686 5.50 44.1 132 1/5 125 ZDR 5 3000 600 39.6 119 1670 833 3.48 56.8 171 1/9 125 ZDR 9 3000 333 73.0 219 1960 980 2.77 73.5 221 Note1) In case of attachment to a motor beyond the standard models (motor matching series),contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 125ZDR3·5·9-3000
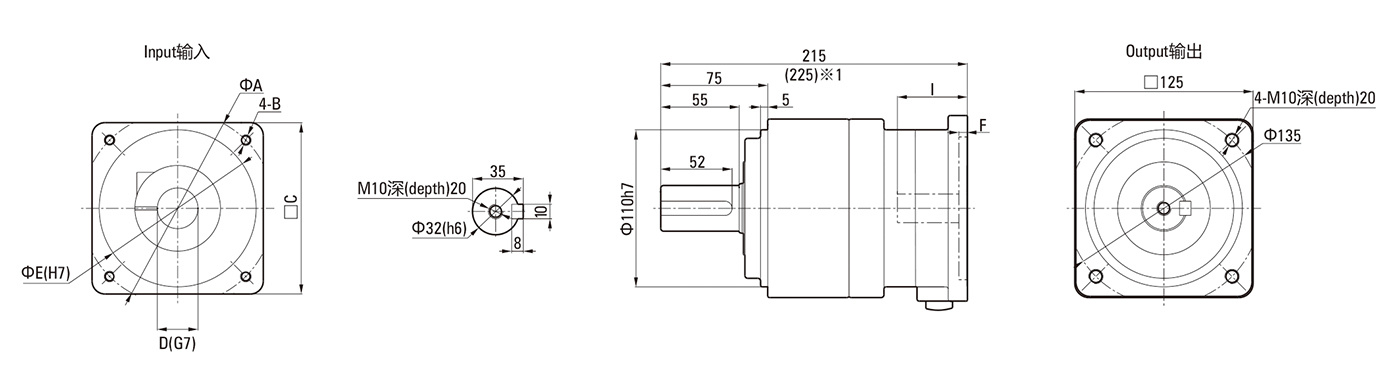
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 130 M8(depth)15 120 22 110 7 55 T2 145 M8(depth)15 130 28 110 7 65 T3 - - - - - - - · Rough weight 12.0kg
· For details of T1~3, see page 333500W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 3500W 1/3 125 ZDR 3 3500 1000 28.3 85.2 1370 686 5.50 44.1 132 1/5 125 ZDR 5 3500 600 47.2 141 1670 833 3.48 56.8 171 Note1) In case of attachment to a motor beyond the standard models (motor matching series),contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 125ZDR3·5-3500
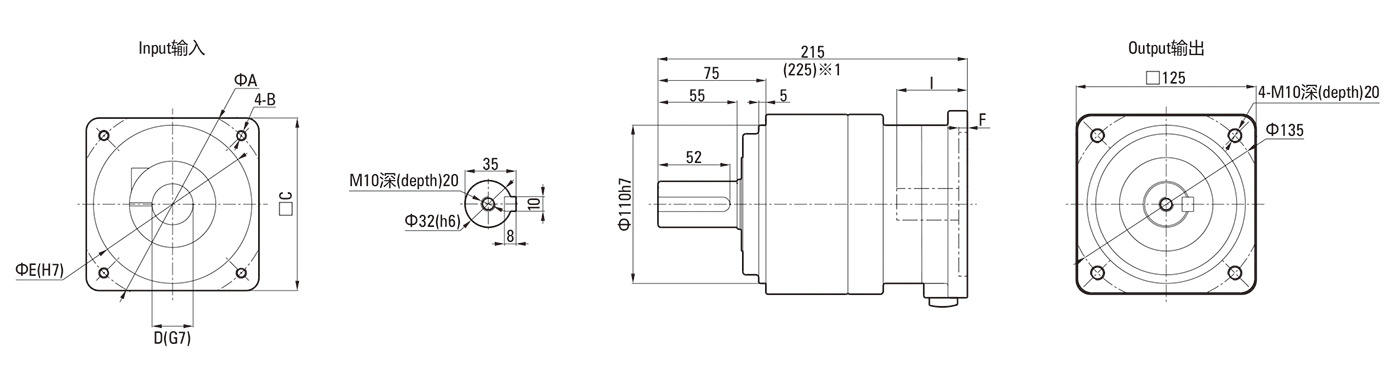
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 130 M8(depth)15 120 22 110 7 55 T2 - - - - - - - T3 145 M8(depth)15 130 28 110 7 65 · Rough weight 12.0kg
· For details of T1~3, see page 334000W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table ( 3,000rpm When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 4000W 1/3 125 ZDR 3 4000 1000 33.1 99.0 1370 686 5.78 44.1 132 1/5 125 ZDR 5 4000 600 55.3 166 1670 833 3.75 56.8 171 Note1) In case of attachment to a motor beyond the standard models (motor matching series),contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 125ZDR3·5-4000
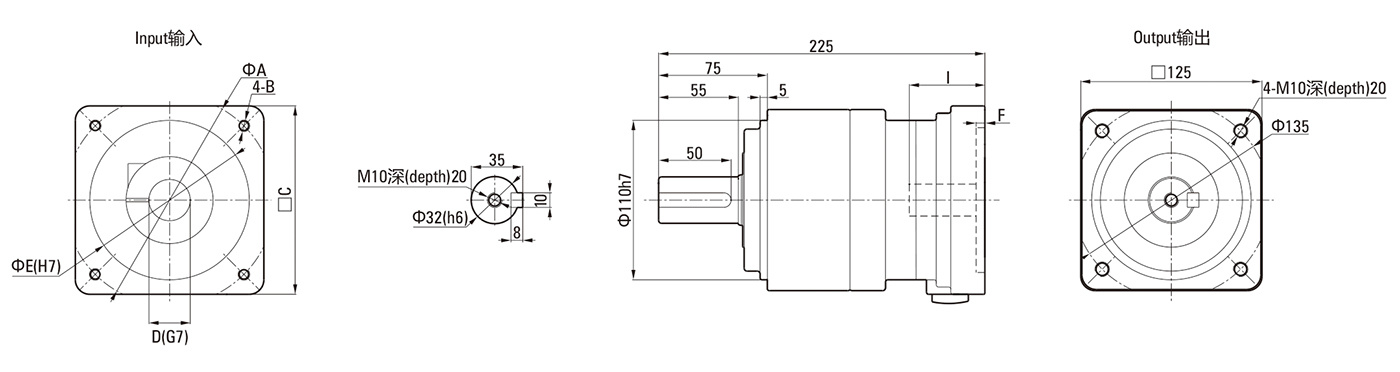
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 145 M8(depth)15 130 24 110 7 65 T2 145 M8(depth)15 130 28 110 7 65 T3 - - - - - - - · Rough weight 13.0kg
· For details of T1~3, see page 334500W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 4500W 1/3 125 ZDR 3 4500 1000 37.7 113 1370 686 5.78 44.1 132 Note1) In case of attachment to a motor beyond the standard models (motor matching series),contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 125ZDR3-4500
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 145 M8(depth)15 130 24 110 7 65 T2 - - - - - - - T3 - - - - - - - · Rough weight 13.0kg
· For details of T1~3, see page 335000W DIMENSIONAL DRAWING & PERFORMANCE TABLE
■ Performance Table (3,000rpm时 When Input Speed Is 3000rpm)
Rated Input Motor Reduction
RatioModel Outout
Shaft SpeedStandard
Output TorqueInstantaneous
Max.Output TorquePermissible
Radial LoadPermissible
Axial LoadInternal Moment Ofinertia
Of Input ShaftconversionPermissible
Output TorqueInstantaneous Max.
Permissible Output TorqueType No Mode Reducton
RatioMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 5000W 1/3 125 ZDR 3 5000 1000 42.9 128 1370 686 5.78 44.1 132 Note1) In case of attachment to a motor beyond the standard models (motor matching series),contact us. (How to measure dimensions of the flange may be changed in some cases.)
Note2) The moment of inertia of input shaft conversion is only gained from the reducer, so it does not include moment of inertia of the motor.
Note3) The max. input speed is 5000rpm, and usually set to 3000rpm or less.
Note4) The permissible radial load is indicated on the center of the output shaft.
Note5) All values are within the range corresponding to helical gear.
Note6) For motor assembly procedure, see page 31.
Note7) Rotation of the output shaft is in the same direction as motor.■ Dimensions
● 125ZDR3-5000
● Detailed Flange Dimensions Table (Unit:mm)
Motor Type A B C D E F I T1 145 M8(depth)15 130 24 110 7 65 T2 145 M8(depth)15 130 28 110 7 65 T3 145 M8(depth)15 130 28 110 7 65 · Rough weight 13.0kg
· For details of T1~3, see page 33RELATED PRODUCTS
MESSAGES
If you have any questions, you can leave us a message. We have professionals to reply to you. Please fill in the correct contact information!
Contact
Ningbo Zhongda Leader Intelligent Transmission Co., Ltd.
Add.: No. 185 Xinxing 1st Road, Cixi High-tech Industrial
Development Zone, Ningbo
Tel: +86-574-63537171
Fax: +86-574-63534879
WhatsApp: +86-19136773454
E-mail: trade20@zd-motor.comFollow us on social:





Copyright © Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. All Right Reserved. Powered by www.300.cn SEO Business license
-
