
We look forward to providing you with professional services - Zhongda Leader


-
-
-
RV Cycloidal Pin Wheel Reducer
PRODUCTS
Detail
Robot model ZDGT10024 Freedom 6 Position Groundinstallation and suspended
ceiling installationMaximum operating speed J1 Axis 85°/sec J2 Axis 84°/sec J3 Axis 126°/sec J4 Axis 156°/sec J5 Axis 145°/sec J6 Axis 205°/sec Maximum operating range J1 Axis ±180° J2 Axis -150°~+85° J3 Axis -80°~+140° J4 Axis ±360° J5 Axis ±120° J6 Axis ±360° Maximum activity radius 2440mm Maximum end load 100Kg Body weight 约About730Kg Allowable torque J4 690N ·m J5 690N ·m J6 260N ·m Allowable moment of inertia J4 57kg ·m² J5 57kg-m² J6 32kg-m² Repeatability ±0.1mm Robot base size 640×650mm Ambienttemperature 0~45℃ Relative humidity 20~80%RH Atmospheric pressure 89KPa~106KPa(Altitude below 1000m) Vibration,impact,collision ≤0.5G Protectiongrade IP54(Wrist IP67) ■ Work scope diagram
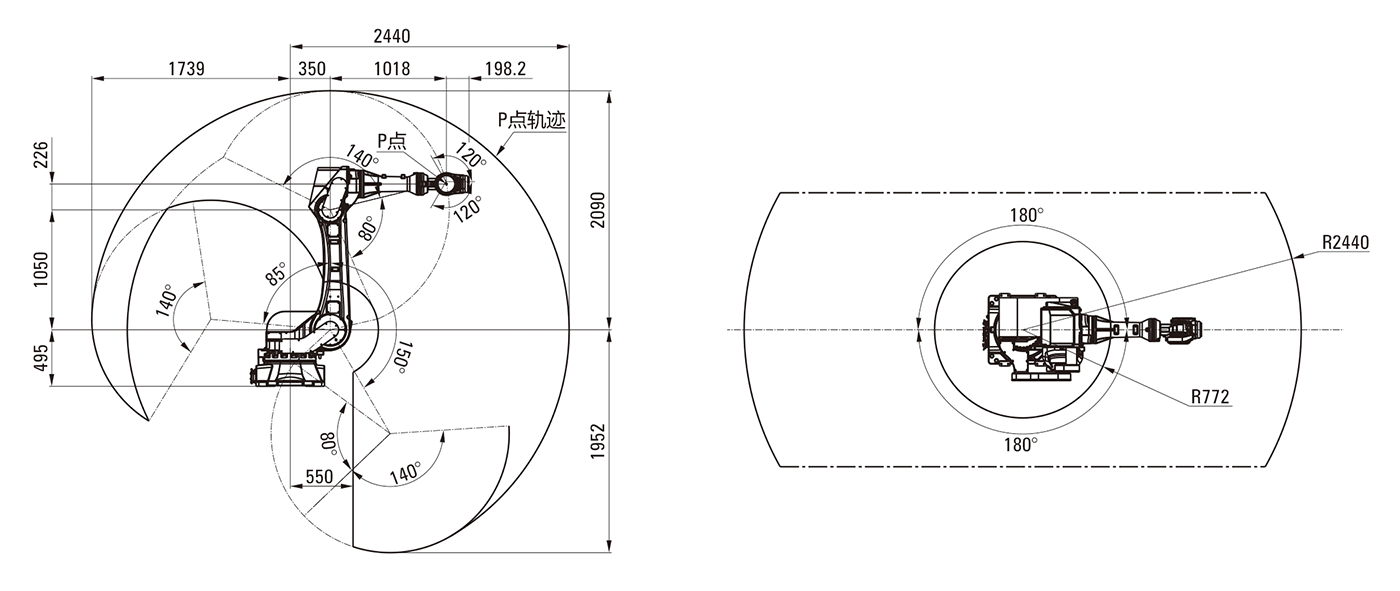
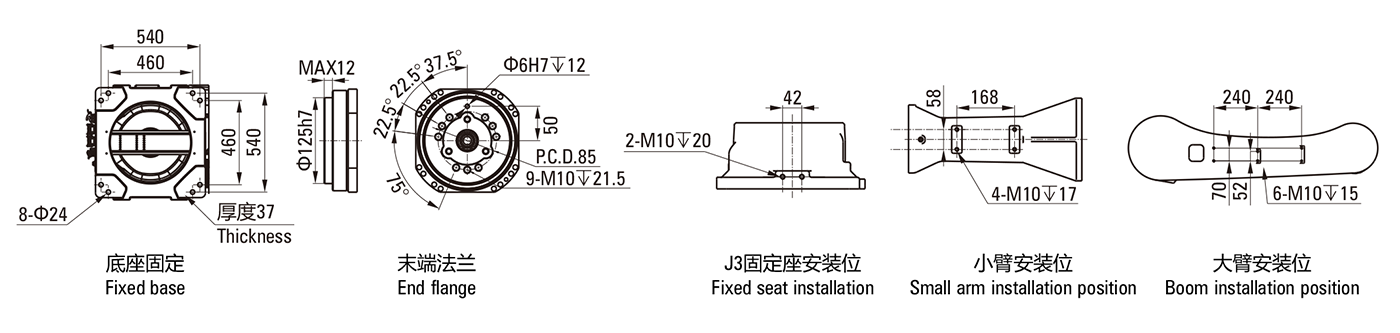
■ Installation interface diagram
■ Inertia tensor of the connecting rod relative to the center of mass
Object Base Rotating seat
componentsBoom components Smallarm fixed seat
componentsSmall arm
componentsWrist Consult Coordinate system 0 Coordinate system 1 Coordinate system 2 Coordinate system 3 Coordinate system 4 Coordinate system 5 lxx(Kgmm²) / 5.8×10⁶ 6.7×10⁶ 2.0×10⁷ 2.4×10⁵ 1.3×10⁵ lyy(Kgmm²) / 1.8×10⁷ 6.5×10⁷ 6.8×10⁶ 2.0×10⁵ 9.9×10⁴ lz(Kgmm²) / 2.0×10⁷ 6.0×10⁷ 2.3×10⁷ 1.1×10⁵ 8.6×10⁴ ■ Joint coupling
Object Base Rotating seat
componentsBoom components Small arm fixed seat
componentsSmall arm
componentsWrist Consult Coordinate system 0 Coordinate system 1 Coordinate system 2 Coordinate system 3 Coordinate system 4 Coordinate system 5 lxx(Kgmm²) / 5.8×10⁶ 6.7×10⁶ 2.0×10⁷ 2.4×10⁵ 1.3×10⁵ lyy(Kgmm²) / 1.8×10⁷ 6.5×10⁷ 6.8×10⁶ 2.0×10⁵ 9.9×10⁴ lzz(Kgmm²) / 2.0×10⁷ 6.0×10⁷ 2.3×10⁷ 1.1×10⁵ 8.6×10⁴ ■ Joint coupling
Joint J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 Coupling relationship equation
(Coupling coefficient)/ / / 80 81 81 ■ Reducer parameters
Model 320CA 500D 160D 80D 60D 42D Reducer reduction ratio 60 52.25 40.25 33 81 81 Comprehensive reduction ratio 210 209 156 151.41 143.53 102.21 Rated output speed(r/min) 15 15 15 15 15 15 Rated torque(N ·m) 3136 4900 1600 784 600 412 Permissible torque for starting
and stopping (N ·m)7840 12250 4000 1960 1500 1029 Instantaneous maximum torque (N ·m) 15680 24500 8000 3920 3000 2058 Moment rigidity(N ·m) 20580 11000 4000 2150 2000 1660 Instantaneous maximum torque (N ·m) 39200 22000 8000 4300 4000 3320 ■ Motor parameters
Joint J1 J2 J3 J4 J5 J6 Motor model 180 180 180 130 130 130 Rated power(kW) 5.5 5.5 4.6 2.5 2.5 1.5 Rated voltage(V) 380 Rated current(A) 22 22 18 6.9 6.9 4.2 Rated torque(N·m) 35 35 29.2 7.96 7.96 4.77 Rated speed(r/min) 1500 1500 1500 3000 3000 3000 Maximum speed(r/min) 3000 3000 3000 4000 3500 3500 Rotor inertia(*10e-4kgm²) 68 68 60 18 18 11 Line back
electromotive force coefficient(V/Krpm)111 111 111 80 80 80 Number of pole pairs 5 Encoder 17 bit multi turn insulationvalue Tamagawa agreement RELATED PRODUCTS
MESSAGES
If you have any questions, you can leave us a message. We have professionals to reply to you. Please fill in the correct contact information!
Contact
Ningbo Zhongda Leader Intelligent Transmission Co., Ltd.
Add.: No. 185 Xinxing 1st Road, Cixi High-tech Industrial
Development Zone, Ningbo
Tel: +86-574-63537171
Fax: +86-574-63534879
WhatsApp: +86-19136773454
E-mail: trade20@zd-motor.comFollow us on social:





Copyright © Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. All Right Reserved. Powered by www.300.cn SEO Business license
-
