
We look forward to providing you with professional services - Zhongda Leader


-
-
-
RV Cycloidal Pin Wheel Reducer
PRODUCTS
Detail
Robot model ZDFX0509 Freedom 6 Position Ground installation andsuspended
ceiling installationMaximum operating speed J1 Axis 233°/sec J2 Axis 236°/sec J3 Axis 291°/sec J4 Axis 372°/sec J5 Axis 500°/sec J6 Axis 375°/sec Maximum operating range J1 Axis ±170° J2 Axis -145°~+80° J3 Axis -70°~+180° J4 Axis ±180° J5 Axis ±130° J6 Axis ±360° Maximum activity radius 948mm Maximum end load 5Kg Body weight 约About 43Kg Allowable torque J4 10.4N-m J5 10.4N ·m J6 5.9N ·m Allowable moment of inertia J4 0.32kg-m² J5 0.32kg-m² J6 0.13kg ·m² Repeatability ±0.05mm Robot base size 200×300mm Ambienttem perature 0~45℃ Relative humidity 20~80%RH Atmospheric pressure 89KPa~106KPa(Altitude below 1000m) Vibration,impact,collision ≤0.5G Protectiongrade IP65 ■ Work scope diagram
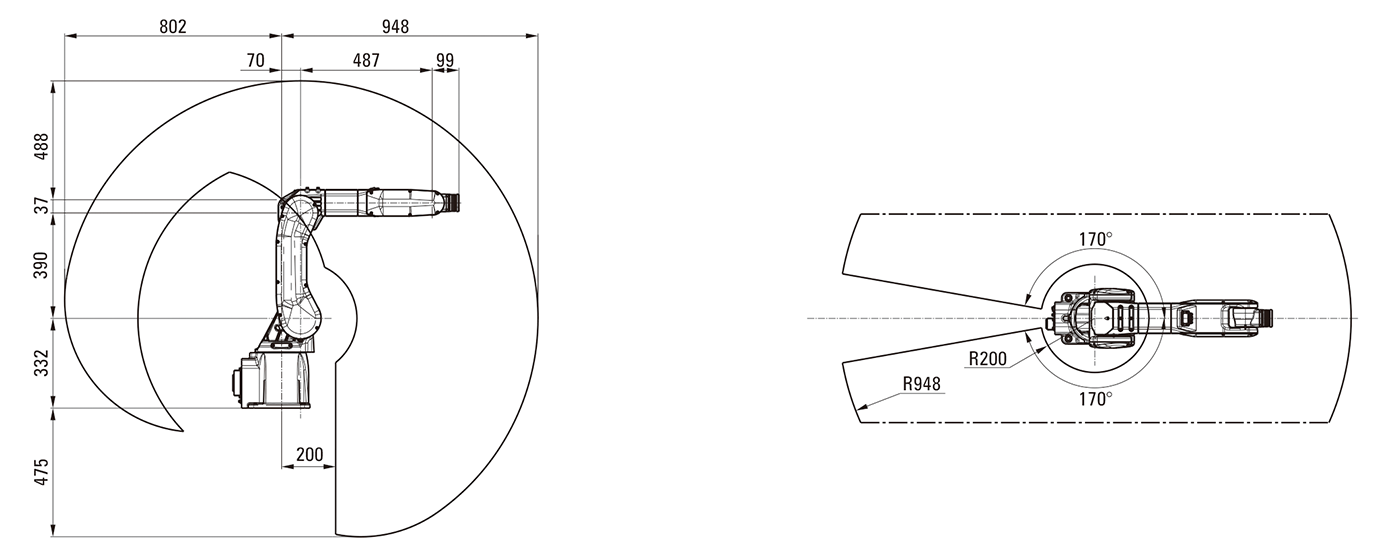
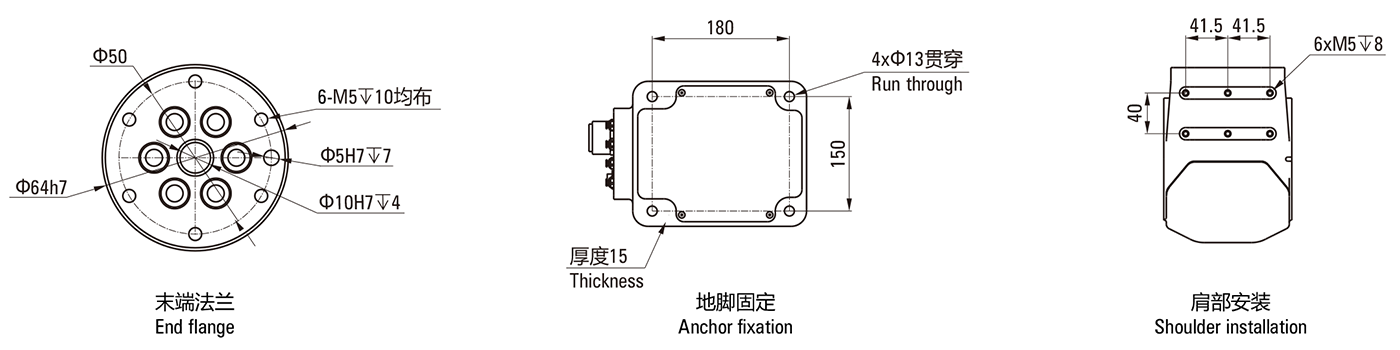
■ Installation interface diagram
■ Inertia tensor of the connecting rod relative to the center of mass
Object Base Rotating seat
componentsBoom components Small armfixed seat
componentsSmall arm
componentsWrist Consult Coordinate system 0 Coordinate system 1 Coordinate system 2 Coordinate system 3 Coordinate system 4 Coordinate system 5 lxx(Kgmm²) / 2.6×10⁴ 7.5×10⁴ 8.3×10³ 3.3×10⁵ 4.1×10³ lyy(Kgmm²) / 3.8×10⁴ 8.7×10⁵ 9.9×10³ 3.2×10⁵ 8.2×10² lz(Kgmm²) / 2.8×10⁴ 8.4×10⁵ 1.9×10⁴ 1.1×10⁴ 4.0×10³ ■ Joint coupling
Joint J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 Coupling relationship equation
(Coupling coefficient)/ / / / / 80 ■ Reducer parameters
Model 32 Harmonic 32 Harmonic 25 Harmonic 20 Harmonic 17 Harmonic 17 Harmonic Reducer reduction ratio 80 80 80 50 50 80 Comprehensive reduction ratio 128.57 114.28 92.571 80.645 60 80 Rated output speed(r/min) / Rated torque(N ·m) 76 76 39 25 16 16 Permissibletorque for starting
and stopping (N ·m)216 216 98 56 34 34 Instantaneous maximum torque (N ·m) 382 382 186 98 70 70 Moment rigidity (N ·m) / Instantaneous maximum torque (N ·m) / RELATED PRODUCTS
MESSAGES
If you have any questions, you can leave us a message. We have professionals to reply to you. Please fill in the correct contact information!
Contact
Ningbo Zhongda Leader Intelligent Transmission Co., Ltd.
Add.: No. 185 Xinxing 1st Road, Cixi High-tech Industrial
Development Zone, Ningbo
Tel: +86-574-63537171
Fax: +86-574-63534879
WhatsApp: +86-19136773454
E-mail: trade20@zd-motor.comFollow us on social:





Copyright © Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. All Right Reserved. Powered by www.300.cn SEO Business license
-
